- Business
- Product
~Releasing as open source on GitHub to promote the development of autonomous driving~

*This news release is jointly distributed by NEXTY Electronics, Saitama University, and the Japan Science and Technology Agency. As such, please note that it may be delivered in duplicate.
NEXTY Electronics Corporation
Saitama University
Japan Science and Technology Agency (JST)
NEXTY Electronics Corporation of the Toyota Tsusho Group ("NEXTY Electronics"; Headquarters: Minato-ku, Tokyo; President:Atsushi Aoki), in partnership with Saitama University (Azumi Laboratory), have developed MATLAB®/Simulink® Robot Operating System (ROS) nodes designed to work with Autoware, the standard software for autonomous driving. These nodes will be released as open source on the software development platform GitHub*1 and available from April 16, 2019*2.
The ROS node samples released utilize the deliverables [1] & [2] from the research topic "Software platform for many-core processors to realize for processing mass date in real-time (Researcher: Takuya Azumi Associate Professor, Saitama University)" in the project for "Fundamental Information Technologies toward Innovative Social System Design (Research Summary: Sadao Kurohashi)" of the Japan Science and Technology Agency (JST) Strategic Basic Research Programs PRESTO (Sakigake).
*1 GitHub:https://github.com/
*2 Public repository: https://github.com/CPFL/Autoware_Toolbox
KEY POINTS
- Sample MATLAB/Simulink ROS nodes capable of connecting 'Autoware' autonomous driving software is developed and released as open source.
- These not only allow developers unfamiliar with the Linux environment or C++ language to reduce the workload when developing software incorporated into autonomous driving systems, but can also be expected to reduce development time and costs by accelerating the cycle of prototyping and evaluation in software development.
- Releasing the nodes as open source is expected to realize several benefits; namely, it facilitates collaboration with companies and universities, provides a way to combine various techniques and ideas, creates an ecosystem for developing autonomous driving systems, and paves the way to the development of new products and services.
DEVELOPMENT BACKGROUND
As autonomous driving moves closer to becoming reality, the software installed in autonomous driving systems continues to grow larger and more complex. As a result, development time and cost are also rising, which has prompted demand for ways to keep these under control.
The process being experimented with in recent years to solve the challenges of software development is to use open source software to rapidly implement features that customers need and accelerate the cycle of prototyping and evaluation to release products. In this process, 'Autoware', an open source software that runs on Linux, has been growing in popularity as the standard software used in autonomous driving. Respective functions are implemented as ROS nodes while new functions can be programmed in using C++. However, it takes time for development engineers unfamiliar with the Linux environment or C++ language to learn them.
To accelerate development and improve quality in complex and large-scale projects, ‘model-based development' is being promoted. At the same time, efforts are also being made to foster engineers for model-based development.
OVERVIEW OF THE RELEASE
As a response to the current situation, NEXTY Electronics and Saitama University worked together to created MATLAB/Simulink ROS node samples capable of connecting with Autoware, which was accomplished by using the ROS node interface provided by Robotics System Toolbox™, an optional product for MATLAB/Simulink. This enables developers unfamiliar with the Linux environment or C++ language to reduce the workload in development. To further accelerate use, additional samples for integrating Autoware and MATLAB/Simulink have been released on GitHub as open source, and the company also intends to continue adding samples and improving documentation.
The released samples can be used as reference software in developing algorithms with MATLAB/Simulink. They can also be used as a point of reference when developing autonomous driving algorithms with MATLAB/Simulink installed in a Windows environment, allowing a developer to immediately verify whether nodes will work once connected to Autoware.
MATLAB includes a suite of tools that support functions such as computer vision and machine learning, and provides a visualization environment that aids in testing and debugging. Through effective use of these samples, we can expect further improvements in the development efficiency of autonomous driving software.
FUTURE EXPECTATIONS
By linking a Simulink model incorporating these samples and external environment simulator, it is possible to reproduce accident scenarios in a simulation environment that would be impractical to investigate in the real world. By automatically executing a variety of test cases in the simulation environment, we can expect a significant boost in efficiency for validating the operation of autonomous driving software.
Releasing these samples as open source is anticipated to facilitate collaboration with other companies and universities. We can also expect other benefits; for instance, it provides a way to combine various techniques and ideas, creates an ecosystem for developing autonomous driving systems, and paves the way to the development of new products and services.
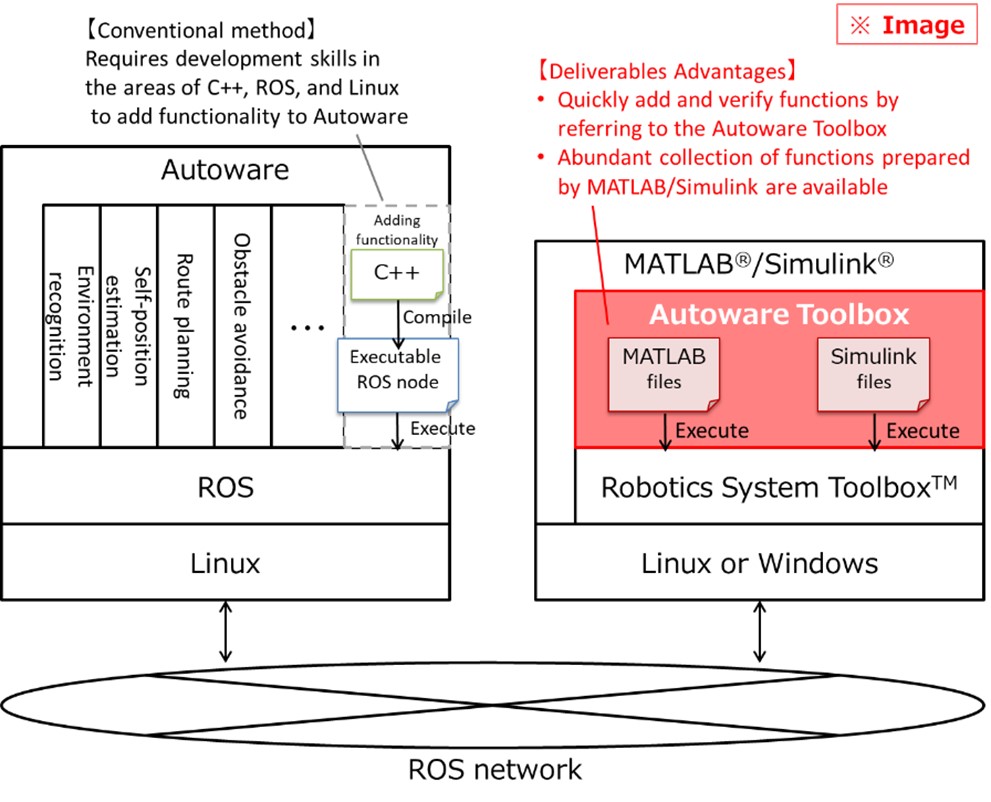
REFERENCE DIAGRAM
Successful integration of MATLAB/Simulink and autonomous driving software Autoware was realized by applying the research results of Reference [1].
REFERENCE
[1] Shota Tokunaga, Yuki Horita, Yasuhiro Oda, and Takuya Azumi, ``IDF-Autoware: Integrated Development Framework for ROS-based Self-driving Systems Using MATLAB/Simulink,'' In Proceedings of the Workshop of Autonomous Systems Design (ASD2019), Florence, Italy, Mar 2019.
[2] Shota Tokunaga, Noriyuki Ota, Yoshiharu Tange, Keita Miura, and Takuya Azumi, ``Demo Abstract: MATLAB/Simulink Benchmark Suite for ROS-based Self-driving System,'' Demo Session of the 10th ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS2019), Montreal, Canada, Apr. 2019.
For inquiries concerning this release, please contact:
NEXTY Electronics Corporation
Public Relations Team, Corporate Planning Dept., Corporate Division
Tel: 81-3-5462-9666
E-mail:nexty_contact@nexty-ele.com
Saitama University
Public Relations.
Hajime Futakawame
Tel: 81-48-858-3932
E-mail:koho@gr.saitama-u.ac.jp
Japan Science and Technology Agency (JST)
ICT Group, Department of Innovation Research, Japan Science and Technology Agency
Hiroko Tatesawa
Tel: 81-3-3512-3525
E-mail:presto@jst.go.jp