
「トンネルや高架下でも、正確な車両位置を把握したい」— —
そんな課題に直面しているECU開発エンジニアの皆さまへ。
本記事では、u-blox社の車載GNSS評価キット「EVK-M8L/M8U」を用いたセットアップ手順と、実走行テストでの活用方法をわかりやすく解説します。
GNSSが届かない場所でも安心!推測航法×IMUの革新技術とは
「都市部での自動運転開発では、トンネル内での位置ズレが大きな課題となっていました。」
あるECU開発メーカーでは、GNSS信号が遮断される環境での測位精度に悩んでいました。そこで導入されたのが、u-blox社のEVK-M8U評価キット。IMUとDead
Reckoningの活用により、トンネル内でも安定した位置情報の取得が可能となり、開発チームは「走行ログの精度が格段に向上した」と高く評価しています。
また、推測航法機能の精度向上を目的としたIMUセンサーの自動キャリブレーション機能により、車両への搭載後、わずか1週間で実走行テストフェーズへと移行可能な体制が整いました。
最新のGNSS測位技術を紹介する前に、歴史的な推測航法技術について少し解説します。
推測航法は、古代の航海において出発点からの進行方向と移動距離に基づいて現在位置を推定する技術として発展しました。船舶では羅針盤によって方位を確認し、ログ(流速計)や砂時計で速度と時間を測定して距離を算出し、航海図に記録して位置を推定しました。
ただし、この方法では誤差が蓄積するため、六分儀による天体観測を併用し、緯度を補正することで航路の精度を維持していました。
これらの技術は、大航海時代の探検や交易において現在のGNSS技術に相当する役割を果たしていたといえます。
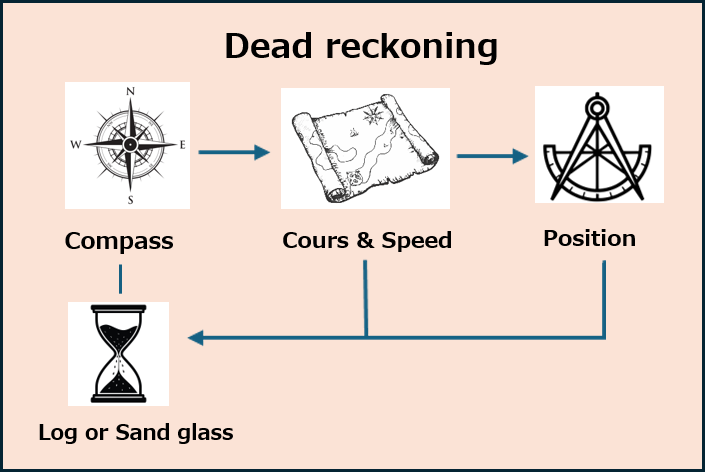
歴史的な推測航法技術の概要
近代技術の発展により、古典的な推測航法技術はGNSS測位技術へと進化しました。GNSS測位では、位置推定には測位衛星と地上局からの信号を使用します。さらに測位とキャリブレーションを自動化することで、絶対位置を精度cm~数mでリアルタイムに算出することが可能になりました。
この技術は、現在の自動車走行ナビゲーションシステムにおける基盤となっています。
| 項目 | 昔の推測航法技術 | 現代のGNSS測位技術 |
|---|---|---|
| 位置推定方法 | 出発点からの方位と距離を積算 | 衛星からの信号で絶対位置を算出 |
| 主な使用機器 | 羅針盤、ログ、砂時計、六分儀 | GNSS受信機、アンテナ、補正装置 |
| 精度 | 誤差が累積しやすく、数km単位 | 数cm〜m単位(RTK等で高精度化) |
| 補正手段 | 天体観測による緯度補正 | 地上局・センサーによる補正 |
| 利用環境 | 海上・陸上・天候に依存 | 世界中で利用可能(屋外中心) |
| 技術の革新性 | 人力・観測に依存した推定 | 自動・リアルタイムな測位が可能 |
| 代表的な用途 | 航海、探検、軍事 | 自動運転、物流、測量、スマホナビ |
推測航法技術の一般的な分類と特徴
EVK-M8L/M8Uとは?車載GNSS評価キットの基本と違い

EVK-M8L(左)、EVK-M8U(右)の外観
EVK-M8L/M8Uは、u-blox社が提供する車載向け高精度GNSS評価キットです。M8Lは推測航法機能を搭載し、M8UはIMUを統合することで、いずれも高精度な位置情報の提供を可能にしています。IMUとはInertial Measurement Unitの略語で、加速度センサージャイロセンサーを組み合わせたユニットを指します。車両の動き(加速度・角速度)を高精度に検出し、GNSS信号が遮断された環境でもIMUのデータを用いることで位置推定を継続できます。そして、これらのセンサー情報をKalmanフィルターで融合し、精度の高いナビゲーションを実現しています。
| パラメーター | 仕様 |
|---|---|
| シリアル・インターフェイス | USB V2.0 ×1 RS232 ×1(最大 921.6kBd) RS232 ×1(最大921.6kBd) DB9 ±12V レベル DDC(I2C準拠)×1(最大400kHz) SPI ×1(クロック最大5.5MHz、データ最大1Mbit/s) |
| スピードパルス・インターフェイス | ホイールテック:3.3V ロジックレベル 前進/後進:3.3V ロジックレベル |
| 外形寸法 | 105 ×64×26 mm |
| 電源 | 5V (USB または補助電源ピン14 (V5_IN)、13 (GND)) |
EVK-M8L/M8Uの基本仕様とインターフェイス構成
EVK-M8L/M8Uは、以下の3つの特長により、車載GNSS評価において高い実用性を発揮します。
特長① GNSSだけじゃない!Dead Reckoningでトンネルでも正確測位
特長② 外部センサー不要!オンボードで手軽に高精度評価
特長③ USB一本で完結!セットアップからログ取得までの流れ
以下にEVK-M8L/M8Uの特徴について詳しく解説します。
【特長①】GNSSだけじゃない!Dead Reckoningでトンネルでも正確測位
GNSS単独による測位では、高層ビル街やトンネルなど遮蔽物の多い環境では衛星信号が途切れ、測位が不安定または不可能になる場合があります。このような環境下でも高精度な測位を可能にする技術が、ジャイロセンサーや加速度センサーの情報を統合して演算処理を行うDead Reckoningです。
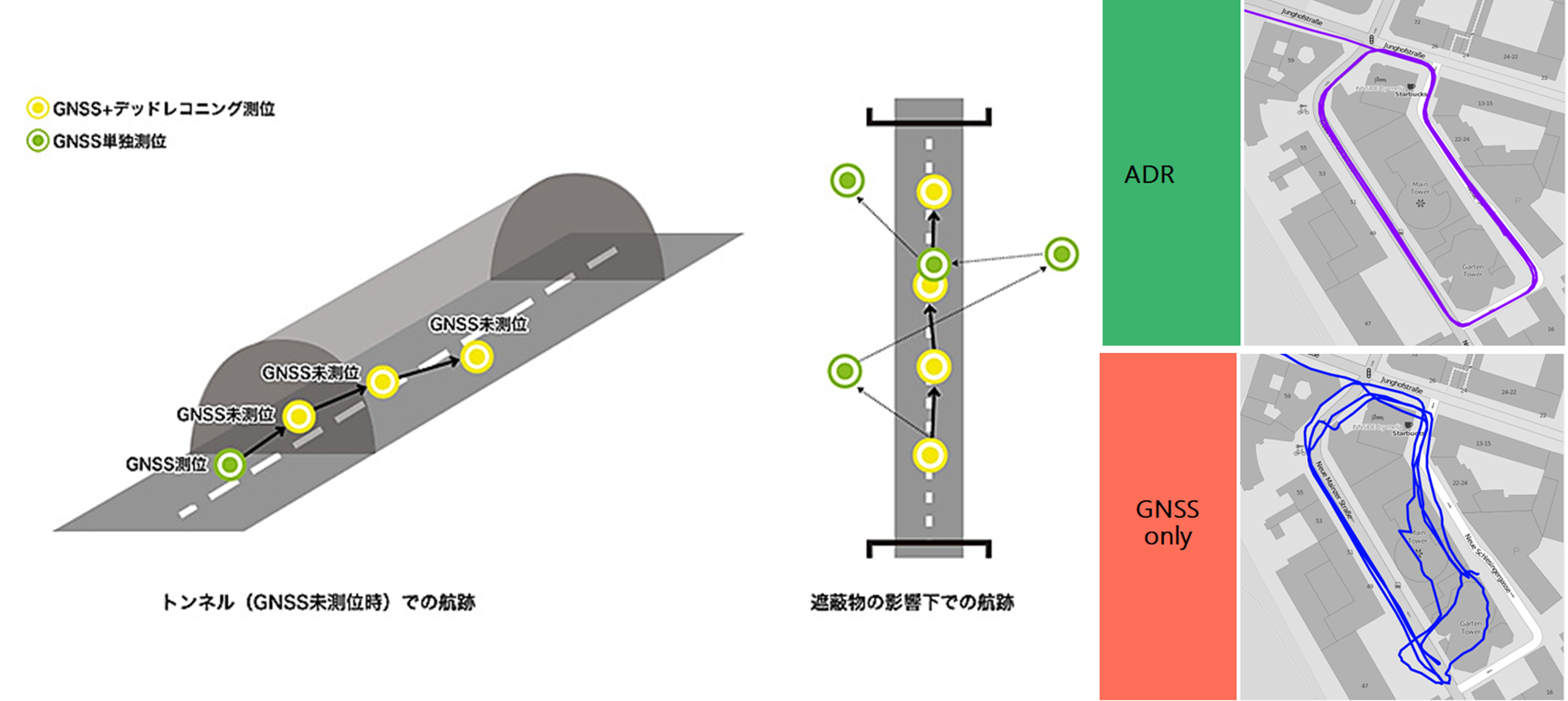
u-blox社のDead Reckoning
u-blox社のDead
Reckoning対応製品は、車両ホイールからの絶対速度・距離と、加速度・ジャイロセンサーによる相対情報を組み合わせることで、GNSS信号が受信できない状況でも継続的な測位を実現します。
EVK-M8Lは車両からの外部信号を活用するADR(Automotive Dead Reckoning)に対応し、EVK-M8Uは外部信号なしで動作するUDR(Untethered Dead
Reckoning)に対応しています。これにより、トンネルや都市部などGNSS信号が遮断される環境でも高精度な位置推定が可能です。
【特長②】 外部センサー不要!オンボードで手軽に高精度評価
EVK-M8L/M8UにはNEO-M8L/M8Uモジュールが搭載されています。NEO-M8L/M8Uモジュールは、加速度・ジャイロセンサーを内蔵しているため、外部センサーなしで単体評価が可能です。さらに、ナビゲーションシステムのコストや性能に応じて、車両に搭載された複数種類のセンサーデータを、用途や精度要件に応じて自由に組み合わせて使用できる設計思想になっています。
<u-blox 自動推測航法の主な特長と技術的優位性>
- 車両の通信バスから車両に搭載された別のセンサーデータを直接取得して活用することで、精度の高い位置推定が可能になります。
- ホイールティック、ジャイロ、加速度センサーを組み合わせた高精度構成から、ホイールティックのみを用いた簡易構成まで、用途に応じた柔軟な対応が可能です。
- Dead Reckoningの実行に必要なホスト側の処理負荷を最小限に抑える設計となっています。
- ソフトウェアキャリブレーション機能により、センサーヘッドユニットの設置誤差を自動で補正します。
- 多様なセンサー構成に対応しており、さまざまな車種展開に柔軟に対応します。
- I2C、SPI、UART、USBなど、豊富な通信インターフェイスを備えています。
- 初期および継続的な自己キャリブレーション機能により、センサーの経年劣化や温度変化による影響を自動補正します。
- 低ホイールティック環境でも安定した動作が可能です。
- 外付けフラッシュメモリーを搭載しており、将来的な改良やアップデートにより、Galileoなどの新しいGNSSシステムにも対応可能です。
- マップマッチング入力機能を内蔵しており、ナビゲーション性能のさらなる向上が可能です。
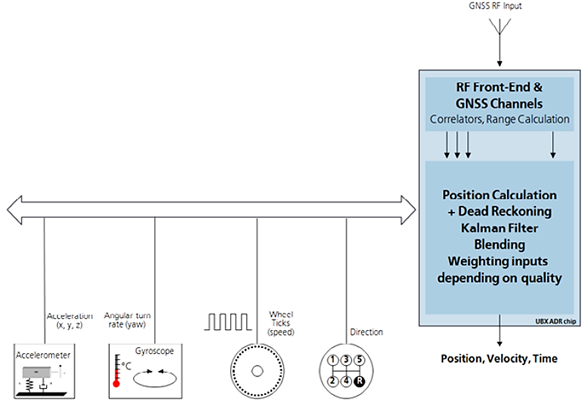
u-blox M8 自動推測航法の実装例
ここで、u-blox M8シリーズにおける自動推測航法機能の実装例を紹介します。
この実装例では、GNSS信号と車両センサーデータを融合し、衛星信号が途絶した環境でも高精度な位置推定を可能にします。
センサー構成(左側)
以下の車両搭載センサーデータが使用されます:
- Accelerometer(加速度センサー):x, y, z軸方向の加速度を検出
- Angular Turn Rate(角速度センサー):ヨー角(車両の旋回)を検出
- Wheel Ticks(車速パルス):車両の速度を検出
- Direction(進行方向):前進・後退などの方向情報を取得 これらのセンサーデータは、中央の処理系に送られ、GNSSと統合されます。
GNSS統合処理(右側)
右側の青いボックス「RF Front-End & GNSS Channels」では、以下の処理が行われます:
- Correlators, Range Calculation:GNSS信号の相関処理と距離計算
- Position Calculation + Dead Reckoning:GNSSとセンサーデータを用いた位置推定と推測航法
- Kalman Filter Blending:Kalmanフィルターによるデータ融合
- Weighting Inputs Depending on Quality:センサーデータの品質に応じた重み付け処理 この統合処理により、最終的に「Position, Velocity, Time(位置・速度・時刻)」が出力されます。

駐車場内でのDead Reckoning精度。GNSS信号が遮断されても正確な位置を維持
上図は、u-blox
自動推測航法機能による駐車場内のドライブテスト結果を示しています。5階建て駐車場の内部走行(複数回の360度旋回を含む)において、車両の位置を正確に追跡できました。ドライブテスト中はGNSS衛星の視界が遮断されていたにも関わらず、駐車場を出る際には車両の位置が左車線の中央に正しく配置されており、自動推測航法機能の有効性が証明されました。
セルフキャリブレーション機能の搭載により、センサー・マウント位置の手動設定や車両信号の極性・論理レベル調整、ホストアプリケーションとの統合作業などの手間を最小限に抑えられ、リスクやコストの低減、迅速な市場投入が可能となります。そのため、ほぼすべての車種やドライブトレイン(前輪駆動、後輪駆動、全輪駆動など)と互換性があります。カーナビゲーションだけでなく、eCall、走行距離に応じた保険料、道路料金、盗難車両追跡など、多くのカーテレマティクスアプリケーションにも適しています。
【特長③】 USB一本で完結!セットアップからログ取得までの流れ
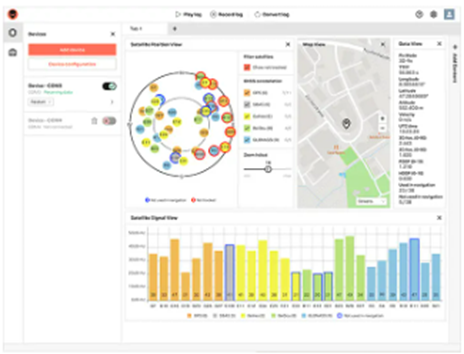
EVK-M8L/M8Uは、USBポートを通じて電源供給とデータ通信を行うことができるので、測定環境を簡単にセットアップできます。u-blox社が提供するGUIであるu-centerおよびu-center 2を使用することで、PC上でGNSSモジュールの設定、データの可視化、ログ取得を効率的に行うことが可能です。
-
u-center
-
u-center 2
-
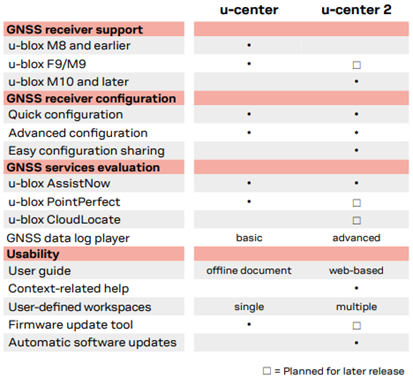
u-blox評価ソフトウェア比較表
■ u-center(従来)
u-blox
M8/M9/F9など従来のGNSS製品向け評価ソフトです。柔軟なUIと強力なログ機能を備え、GNSSサービスの動作確認や設定変更が可能です。RTK測位にも広く利用される業界標準ツールになります。
■ u-center 2(新世代)
u-blox
M10/F10/X20など最新のGNSS製品向け評価ソフトです。直感的なUI、パーソナライズ可能なワークスペース、ログ再生機能、自動更新などを搭載し、評価・設定作業を効率化できます。
次の章では、評価キットのセットアップから動作検証までの流れを説明します。
実機で試す!セットアップから走行テストまでの手順
EVK-M8L/M8Uの導入は、ハードウェアの接続、ソフトウェアのインストール、初期通信の確認といった明確なステップで構成されています。特にM8Uでは、IMUセンサーのキャリブレーションが精度向上の鍵となります。
テスト車両の準備と信号取得のポイント
EVKの推測航法機能を正確に動作させるためには、車両から車速パルスWHEELTICK信号および進行方向FWD信号を取得することが不可欠です。車両のCANメッセージにアクセスできる場合は、これらの情報をUBX-ESF-MEASメッセージとしてEVK-M8Lの通信ポートに入力することができます(例:ソフトウェアインターフェイス)。EVK-M8Lのデフォルトのコンフィグレーションでは、WHEELTICK信号およびFWD信号はハードウェアからの入力に設定されています。これらの情報をUBX-ESF-MEASメッセージで取得する場合は、UBX-CFG-ESFWTコマンドを使用してコンフィグレーションを変更する必要があります。(ソフトウェアインターフェイスの詳細は別途プロトコル仕様書をご参照下さい。)

車両から車速パルスWHEELTICK信号および進行方向FWD信号 入力構成図
WHEELTICK信号(以下、WT信号):
- WT信号は車両のリファレンス・ポイントの移動距離を表します。リファレンス・ポイントは車両のミッドリア・アクスルです。
- WT信号は一連のパルスで構成されており、1パルスあたりの移動距離は0.4m未満である必要があります(推奨値は約1cm以内)。
- WT信号は進行方向に関係なく使用可能で、EVK入力に印可する前に十分に安定化する必要があります。
FWD 信号:
- FWD信号は進行方向(前進または後進)を示します。
- FWD信号はいずれかの極性を持つことが可能で、設定はUBX-CFG-ESFWTコマンドで設定できます。
(デフォルトではHigh値が前進を意味します。) - FWD信号は、車両が静止している状態でも前進または後進の状態を保持している場合があります。
ハードウェア接続:PC・アンテナ・OBD2との連携
EVK-M8L/M8Uは、USBケーブルもしくはRS-232ケーブルを用いてPCと接続します。USBポートから電源供給と通信が可能なので外部電源は不要です。GNSS用アンテナをEVKに接続し、必要に応じて車速パルスや外部IMUなどの信号も入力できます。EVK-M8Uの場合、内蔵IMUセンサーが搭載されているため、外部センサーの追加は不要です。
OBD2機器は通常、車両診断に使用されますが、本構成では運転ログ取得を目的として、車両ECUからCAN通信を介して車速情報をデジタル形式で取得します。取得した車速データをEVK-M8L/M8Uにインプットします。
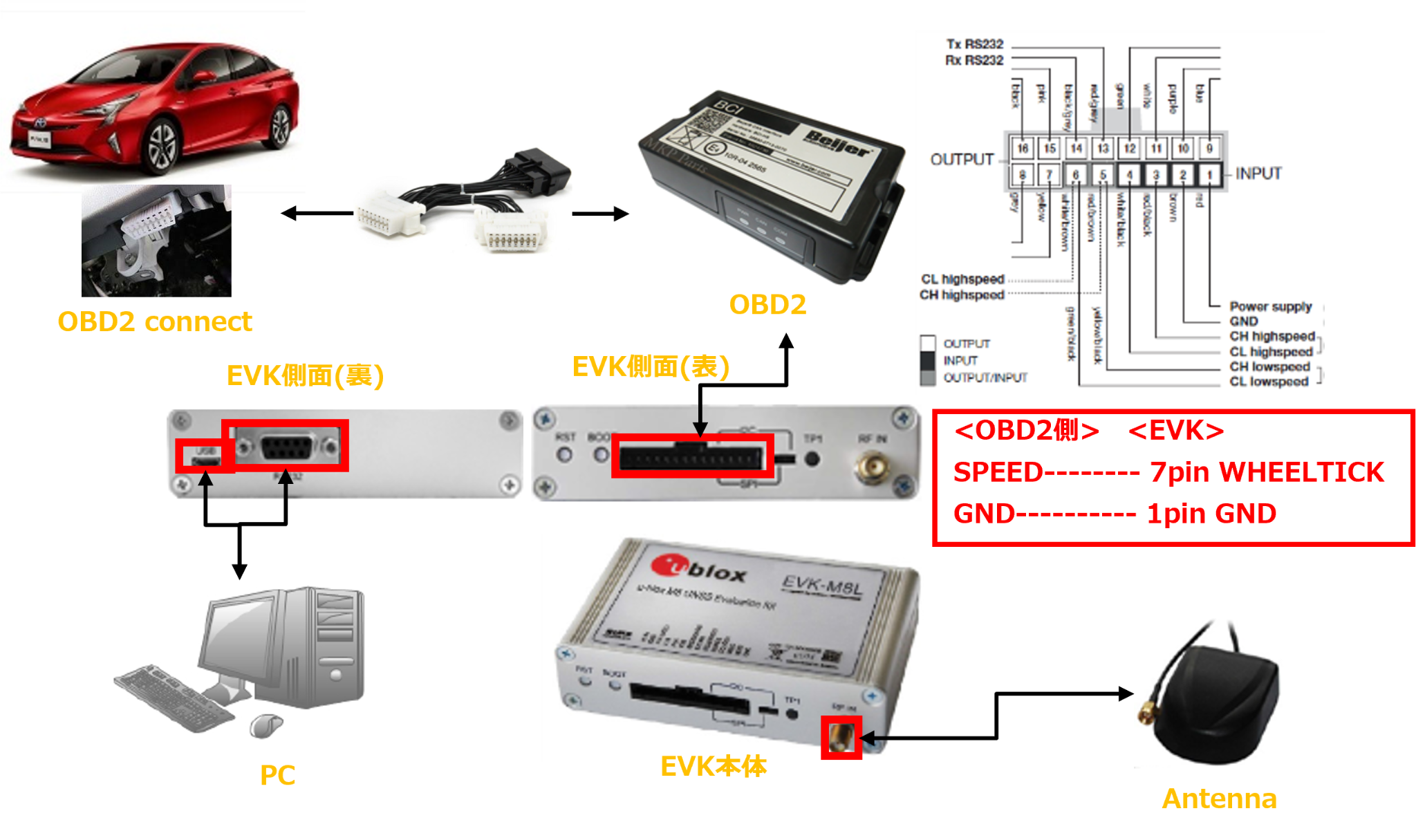
EVK-M8L/M8Uの接続構成例(ハードウェア入力)
ソフトウェアインストール:u-centerの使い方
まず、u-blox社が提供する「u-center」ソフトウェアをPCにインストールします。先程説明した通り、u-centerはGNSSモジュールの設定、データの可視化、ログ取得、ファームウェア更新などを一括で行える統合ツールです。Windows環境に対応しており、USB接続後に自動認識されるため、インストール後すぐに使用可能です。
u-centerによる設定画面例
ソフトウェアインストール後、u-centerを起動し、EVK-M8L/M8Uとの通信が確立されているかを確認します(上図:u-centerによる設定画面例では、2つの赤枠で緑色のアイコンが通信確立を示しています)。GNSS信号の受信状況、捕捉衛星数、現在位置などの情報がリアルタイムで可視化され、通信状態の確認が容易に行えます。
キャリブレーション設定:精度を左右する5つのステップ
EVK-M8L/M8Uで走行テストを実施するには、事前にキャリブレーション設定を行う必要があります。主に必要な設定は下記5点になります。
1. センサー・マウント・アライメントの自動設定方法
2. 本体・アンテナの設置位置とレバーアーム設定
3. WHEELTICK・FWD信号の設定と確認方法
4. 設定保存と再利用:コンフィグレーションの保存手順
5. キャリブレーション走行の確認とステータスチェック
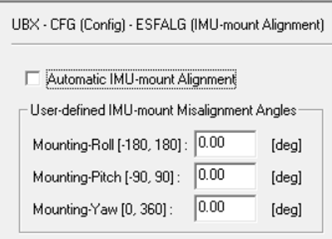
1. センサー・マウント・アライメントの自動設定方法
センサー・マウント・アライメントの自動設定は、u-centerの「Message view」画面内にある「UBX-CFG-ESFALG」コマンドを使用して設定します。Automatic IMU-mount
Alignmentは、IMU(慣性計測装置:加速度センサー+ジャイロセンサー)の取り付け角度(Roll/Pitch/Yaw)を自動でキャリブレーションする機能です。キャリブレーション走行時に正しい角度を自動で設定したい場合は、“Automatic
IMU-mount Alignment”ボックスをチェックしてからSend ボタンをクリックします。
※センサー・マウントのアライメント角が判明している場合はUBX-CFG-ESFALG設定画面で、それらの値を直接入力します。このとき、“Automatic IMU-mount Alignment”
のチェックは外してください。
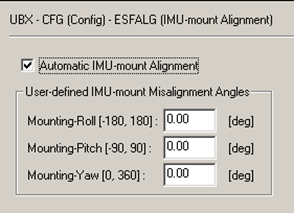
UBX-CFG-ESFALG設定画面
Auto Alignmentは、UBX-ESF-ALGフィールドで確認できます。センサー・マウントのアライメント・キャリブレーション中は、UBX-ESF-ALGフィールドのステータスは下図のように推移します。キャリブレーション開始時にはステータス表示が空欄ですが、進行に伴いMounting-Roll/Pitch/Yawにそれぞれ値が表示され、最終的にAuto Alignmentのインジケーターが緑色「〇(正常)」に変化すればキャリブレーションは正常終了です。※このときAuto Alignmentのインジケーターが緑色+”ON”の表示になっていることを確認する必要があります。

UBX-ESF-ALGフィールドのステータス推移
2. 本体・アンテナの設置位置とレバーアーム設定
- EVK-M8L設置場所の設定方法について
EVK-M8L本体とアンテナの設置位置は、u-centerの「Message view」画面内にある「UBX-CFG-ESFLA」コマンドを使用して設定します。後輪の中心(VRP:Vehicle Reference Point)を基準に、EVK-M8L(IMU)本体とアンテナの設置位置までのX・Y・Z方向の距離をそれぞれ入力します。数値は左側(下図赤枠)の欄にのみ入力してください。右側の欄には入力しないよう注意してください。
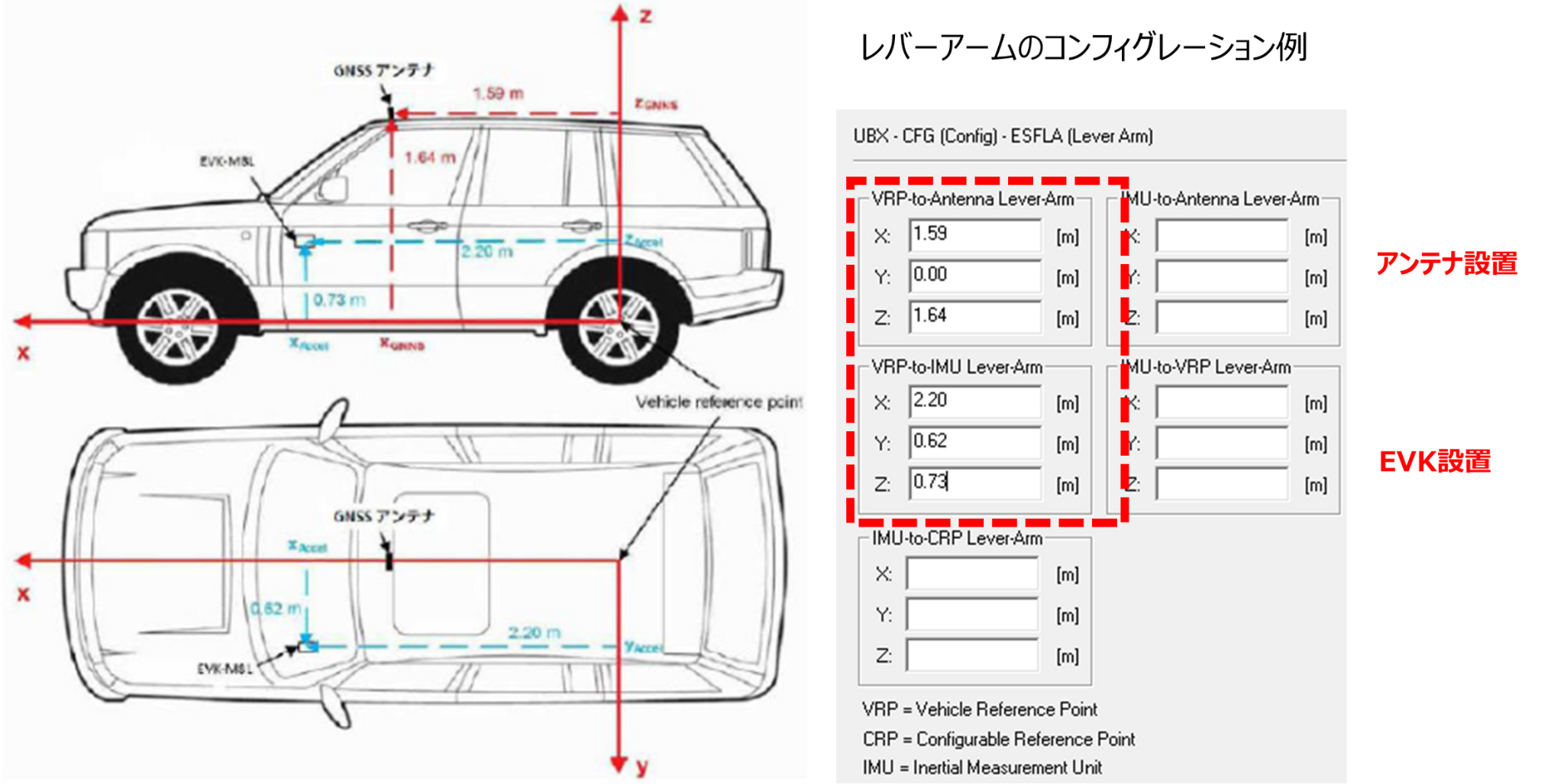
評価キット(IMU)とアンテナ位置の構成図(EVK-M8L)
- EVK-M8U設置場所の設定方法について
EVK-M8Uの場合も、同様にUBX-CFG-ESFLAコマンドを使用して本体とアンテナの設置位置を設定します。先程のEVK-M8Lとは設定が異なり、EVK-M8U(IMU)およびアンテナの設置位置を基準に、VRP(後輪の中心)までのX・Y・Z方向の距離を入力します。値は右側の欄にのみ入力してください。左側の欄には入力しないよう注意してください。
EVK-M8Uでは、評価キットはラベルを上面にし、X方向を進行方向にして水平に固定する必要があります。EVKを上下逆または進行方向と逆向きに設置すると、車両停止時にジャイロや加速度センサーの出力が誤った符号(マイナス)になる可能性があります

EVK-M8Uの3次元座標系
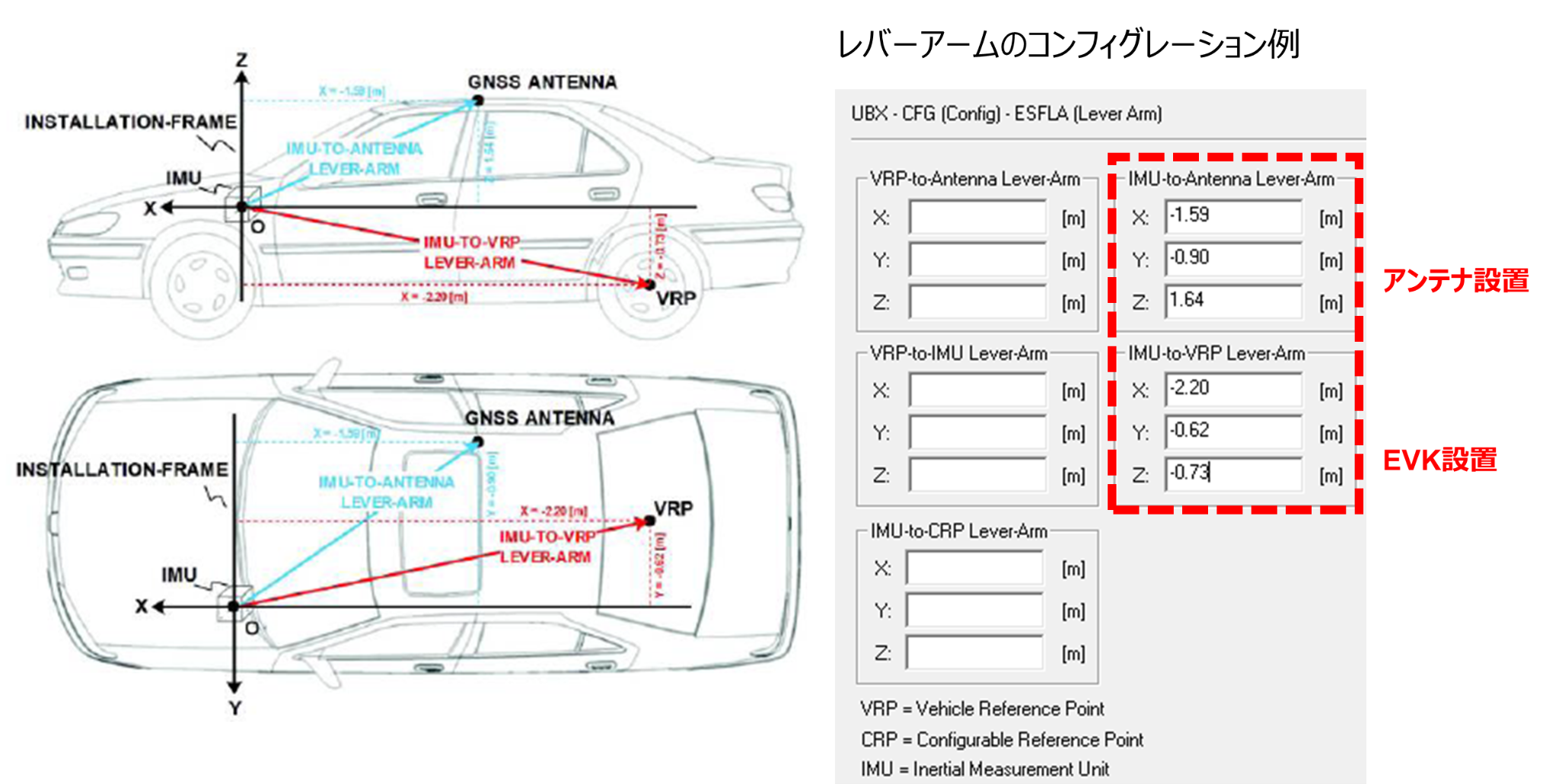
評価キット(IMU)とアンテナ位置の構成図(EVK-M8U)
3. WHEELTICK・FWD信号の設定と確認方法
WHEELTICKおよびFWD信号の設定では、前進後進を判別するFWD信号を適切に設定する必要があります。実際の車両のFWD信号の極性を確認するには、ギアが前進に設定されている状態でFWD信号のレベルをマルチメーターで計測する方法があります。Message view画面のUBX-CFG-ESFGAWTコマンドを使用して、Direction Pin Polarity(FWD)を適切に設定します(下記参照)。通常は、FWD信号の極性以外のパラメーターを変更する必要はありません。デフォルト値を変更した場合はu-centerのSendボタンをクリックします。
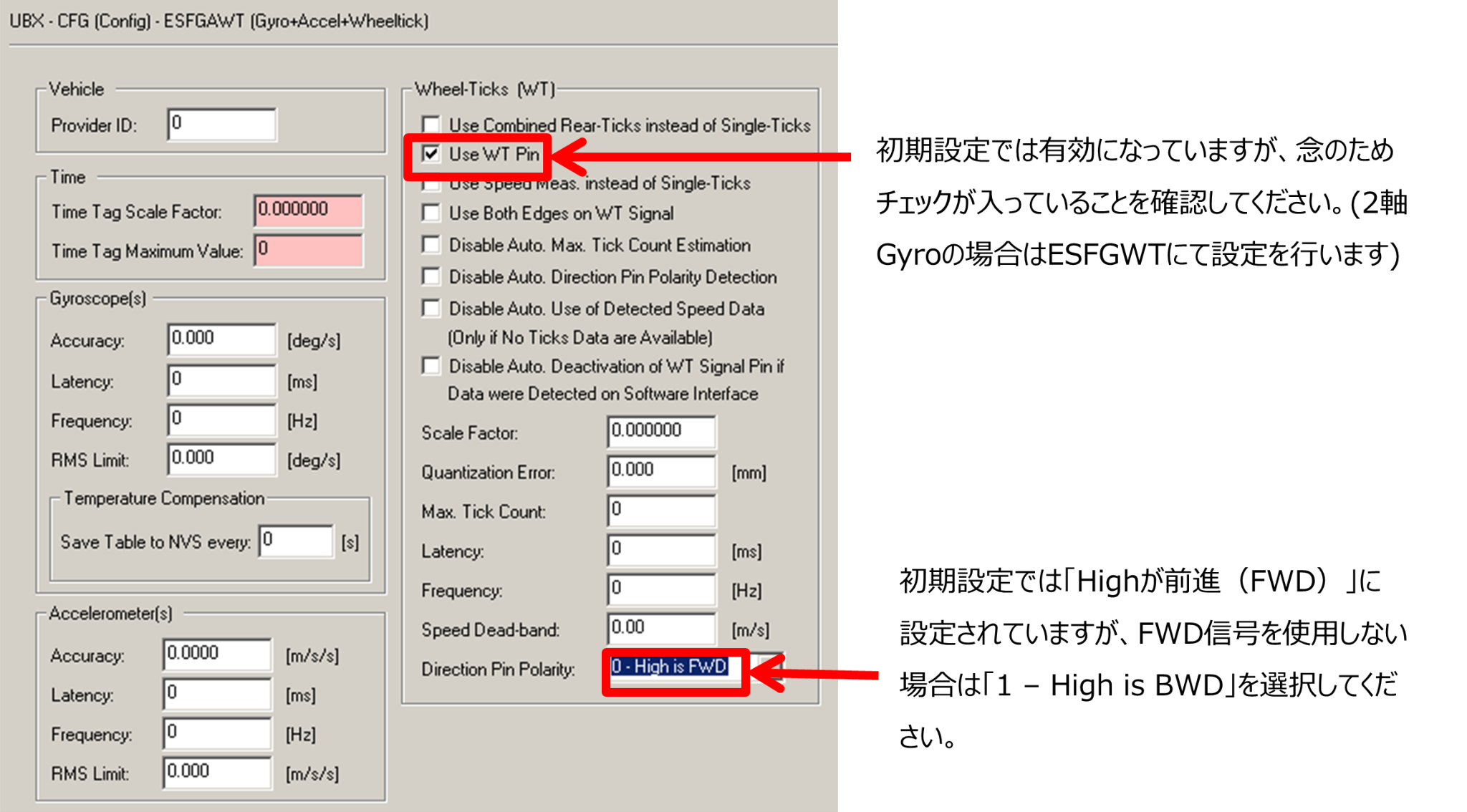
WHEELTICK信号とFWD信号の設定画面
4. 設定保存と再利用:コンフィグレーションの保存手順
自動で取得したセンサー・マウント・アライメント設定は、EVK内の不揮発性メモリーに保存可能です。不揮発メモリーに保存したアライメント情報はコールドスタート時に再ロードされ、次回の自動アライメント実行時まで保持されます。
センサー・マウント・アライメント設定を不揮発性メモリーに保存する手順は次の通りです。
① UBX-CFG-ESFALG画面を開き(左下図参照)、“Automatic IMU-mount Alignment”のチェックを外してから「Send」ボタンをクリックします。
②続いて、右下図のUBX-CFG-CFG設定画面でUBX-CFG-CFGコマンドを送信することで、アライメント設定を含むすべてのADRパラメーターを、BBRおよび不揮発性メモリー(Flash)に保存できます。
-
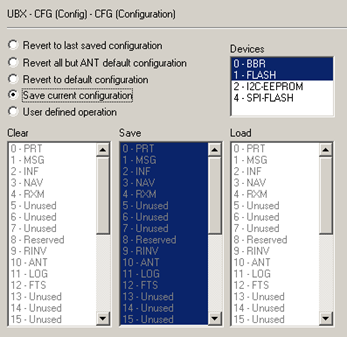
UBX-CFG-CFG設定画面
-
UBX-CFG-ESFALG設定画面
5. キャリブレーション走行の確認とステータスチェック
EVKが車両から取得した速度・進行方向情報または内蔵センサー(ジャイロ・加速度)で取得した情報は推測航法(ADR)機能の精度向上に活用されます。EVKが十分な左右旋回を含む走行データを収集し、センサー・マウント・アライメントのキャリブレーションを完了する必要があります。ADRの設定をフラッシュメモリーに保存する場合、キャリブレーション走行は1回のみの実施で十分です。キャリブレーション状態は、UBX-ESF-STATUSフィールドで確認できます。キャリブレーション状態の確認が終わったら、テスト走行が可能になります。
<キャリブレーション状態の確認について>
キャリブレーション走行は、上空の視界が開けたオープンエリアで行うことが望ましいです。例えば、駐車車両のない広い駐車場などが適しています。
① キャリブレーションの進行状況は、以下の2種類のUBXメッセージで確認できます:
UBX-ESF-STATUS:全体のキャリブレーション状態
UBX-ESF-MEAS:各センサー(車速・ジャイロ)の入力状況
② UBX-ESF-STATUSでは、キャリブレーション状態が「NOT
CALIBRATED」または「INITIALIZING」から、「SUSPENDED」「CALIBRATING」を経て、「INITIALIZED」または「FUSION」へと遷移します。
未キャリブレーション:”NOT CALIBRATED”もしくは”INITIALIGING”
キャリブレーション中:”SUSPENDED”、”CALIBRATING”
最良な状態:”FUSION”、“INITILIZED”、もしくは” CALIBRATED”
③ UBX-ESF-STATUSのFusion Filter Modeが「FUSION」と表示されていれば、キャリブレーションは正常に完了し、最適な測位状態に達しています。
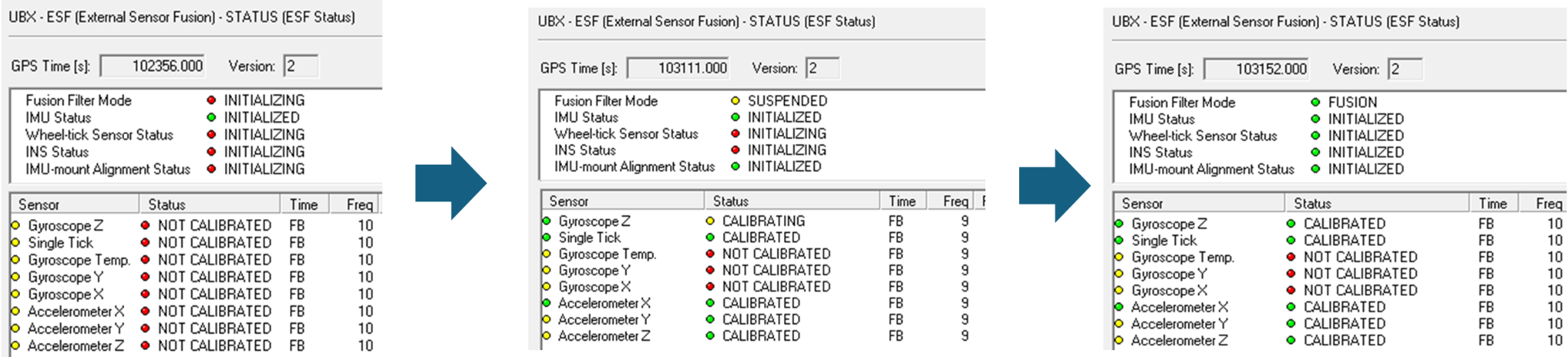
UBX-ESF-STATUS画面(ステータス推移)
動作検証とログ活用
EVK-M8L/M8Uの推測航法(ADR)機能を正しく動作させるには、実車環境での走行テストが不可欠です。IMUや車両信号をGNSSと統合することで、衛星信号が途絶した場面でも高精度な位置推定が可能になります。
走行テストでは、左右旋回を含む十分な走行データを収集し、センサー・マウント・アライメントのキャリブレーションを完了させる必要があります。走行軌跡はGoogle
MapやEarthで表示することで、ルートの妥当性やキャリブレーションの進行状況を視覚的に確認でき、精度検証やでデバッグレポートにも活用できます。
Google Map / Earthでの表示方法
走行テストで取得したログは、Google Map上に走行軌跡として表示可能です。まず、u-centerでログを再生後、プルダウンメニューから『File』→『Database Export』→『Google Map
Html』を選択してください。
選択後、任意の場所にファイルを保存してください。u-centerでログを再生後、プルダウンメニューから『File』→『Database Export』→『Google Map Html』を選択してください。
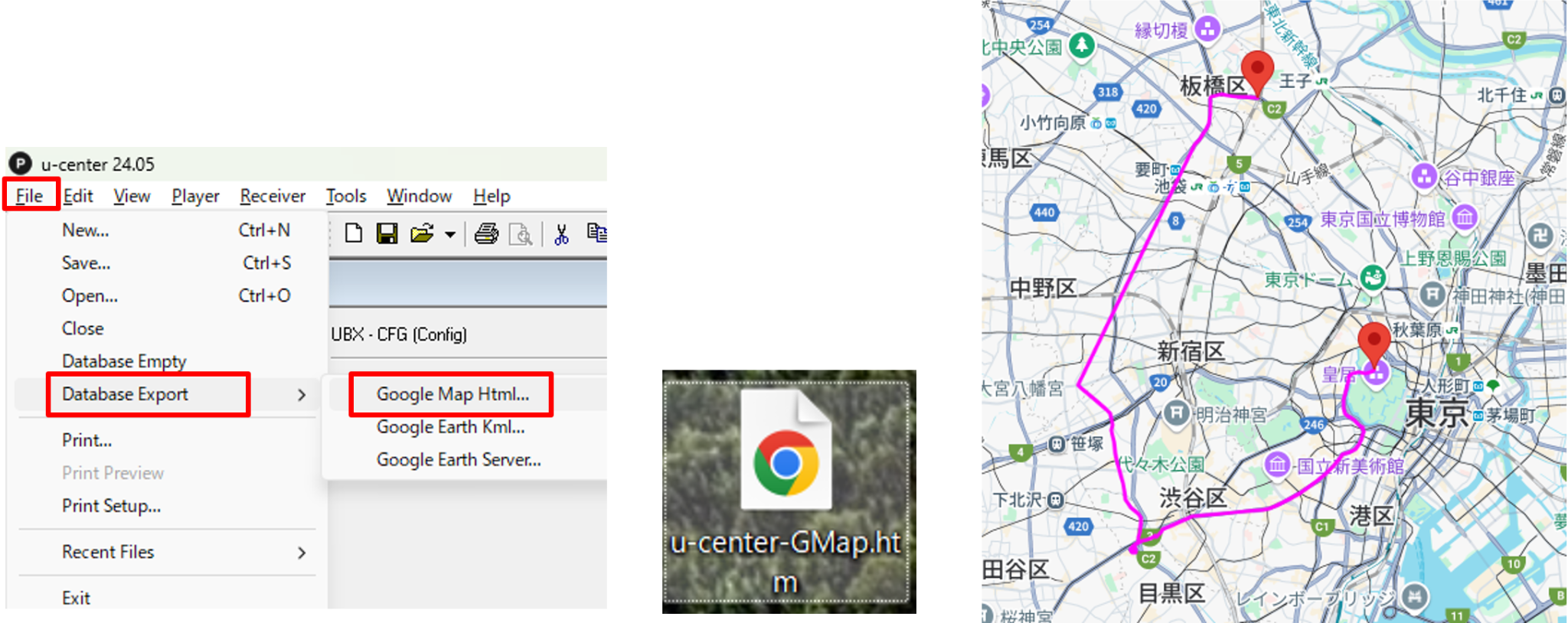
UHtmlファイルの作成手順、およびgoogle map上の走行ログ軌跡
Google Mapと同様に、取得したログはGoogle Earth上にも走行軌跡として表示可能です。作成したファイル(Kml)をダブルクリックすると、Google Earthが起動し、走行テストで取得したログをGoogle Earth上に表示することが確認できます。
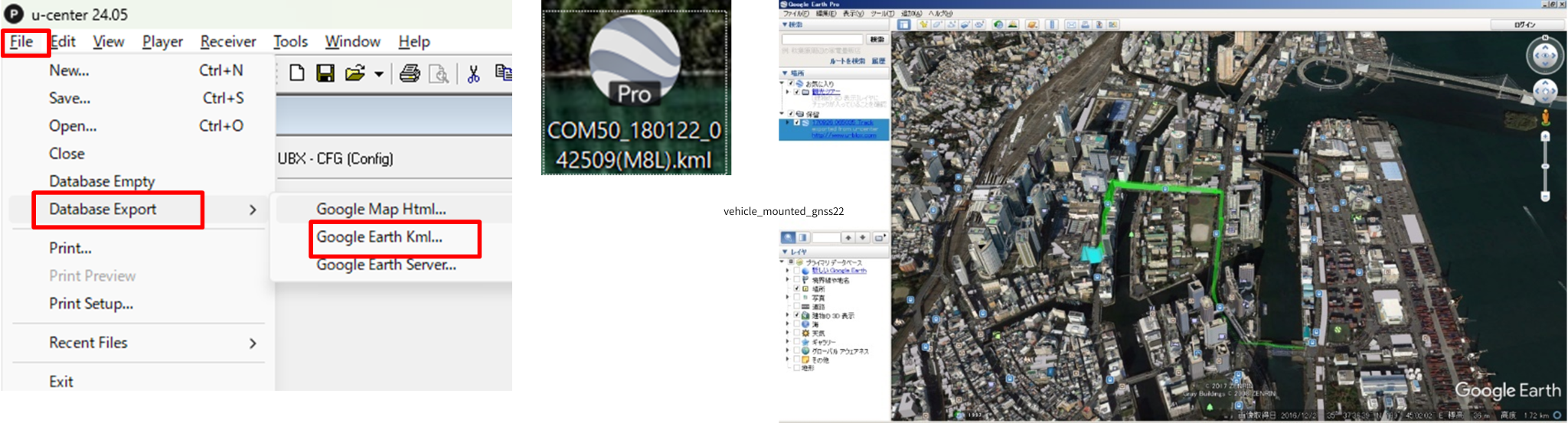
kmlファイルの作成手順、およびgoogle Earth上の走行ログ軌跡
テスト走行中のログ取得と解析
テスト走行中には、予期しない挙動や測位の不具合が発生する可能性があります。これらの解析には、テスト走行中のデータを記録・保存しておくことが重要です。Debugボタンをクリックし、続いてRecordボタンを押すことで、通常ログにデバッグメッセージを追加できます。デバッグメッセージを追加しておけば解析が容易となるため、テスト走行時には有効化を推奨します。
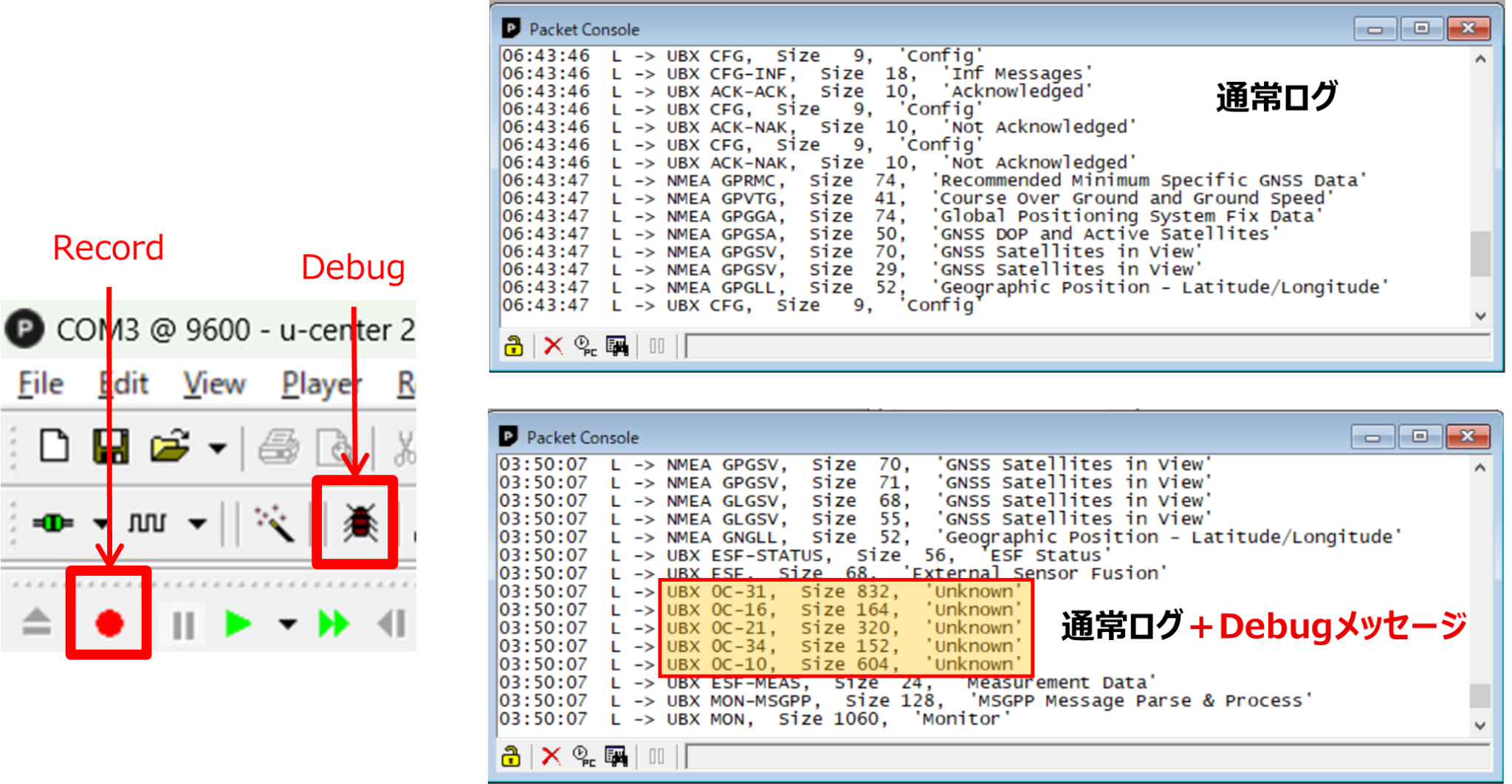
デバッグやテスト後の解析に使用するRecordボタンとDebugボタン、およびログ確認画面
よくあるトラブルとその対処法
測位状態が不安定
走行テストで測位状態が不安定な場合は、以下の項目を確認してください。
① 衛星配置が偏っていないか(DOP値が高すぎないか)
② 設定した衛星が正常に受信できているか?
③ 受信信号レベルが概ね40dB以上か?
④ 衛星受信数は最低でも3~4基あるか?
⑤ 緯度・経度・高度は適切な値になっているか?
⑥ 測位モード(3D fix)が確認出来ているか?
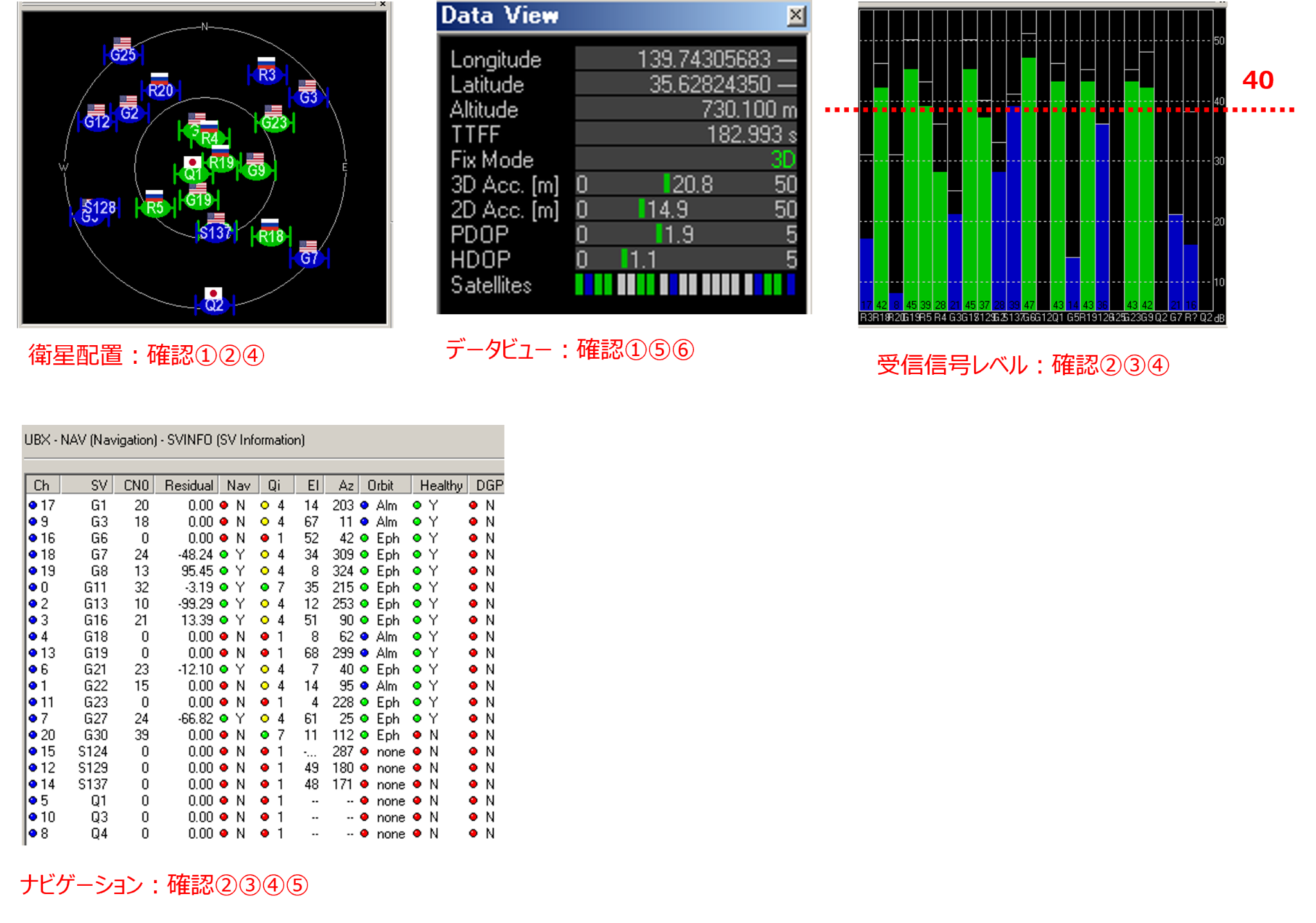
u-center上で確認すべき項目画面
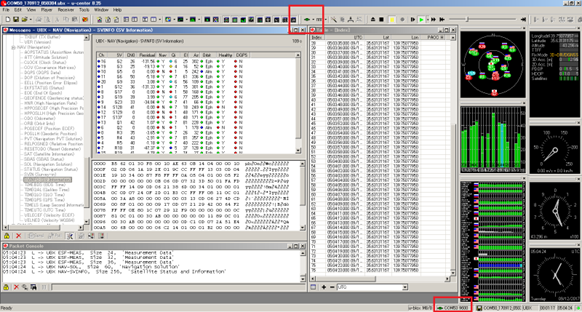
3D Fixから3D+DRモードへ移行しない
GPS単独測位(3D Fix)から3D+DRモードへ移行しない場合は、車両からの車速パルス(WHEELTICK)が正しく入力されているかを確認してください。u-Center上のプルダウンメニューから『View』→『Table View』を選択し、Table Viewウインドウで”ESF-MEAS Single Tick”を選択「+」してください。ウインドウのIndexに”ESF-MEAS Single Tick”が追加されます。
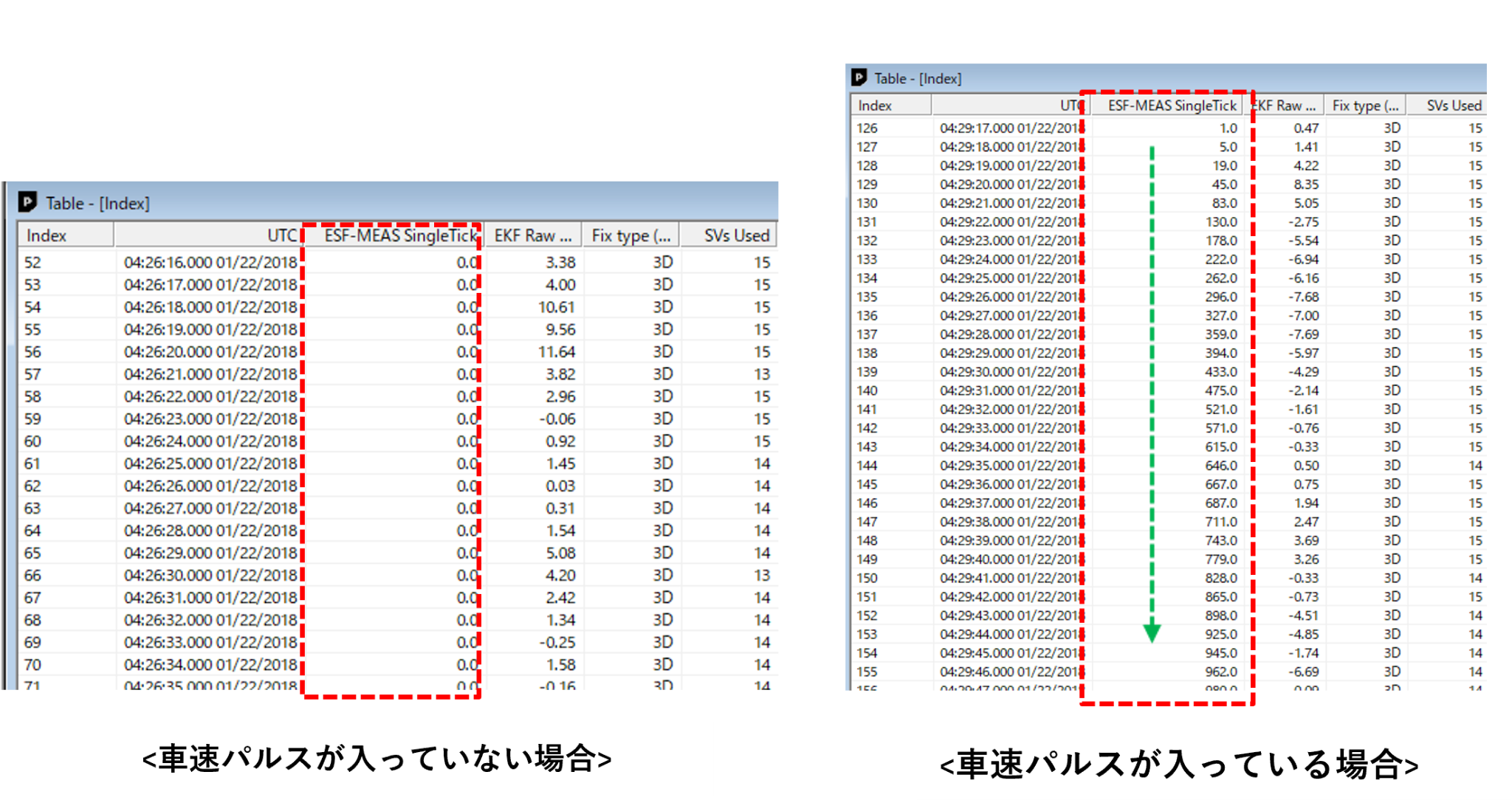
車両から車速パルスが入力されていない場合は、ESF-MEAS Single Tickの値が「空白」または「0.0」のまま変化しません。この場合、3D Fixモードから3D+DRモードへも移行しません。
車両から車速パルスが入力されている場合は、ESF-MEAS Single Tickの値がインクリメント(増加)され、徐々に値が増えていくことが確認できます。そして、3D
Fixモードから3D+DRモードへ正常に移行します。
位置飛びの原因と対策
走行テスト中に、軌跡が不自然に飛ぶ「位置飛び」が発生することがあります。要因は測定環境によってさまざまですが、主な要因はマルチパスの影響が大きく、その他要因は下記などが挙げられます。
位置飛びの主な要因:
- C/No(信号強度)が低い
- 捕捉衛星数が少ない
- DOP値が高い(衛星配置の影響)
- 測位モードが「No Fix」「Invalid」「2D Fix」など不安定な状態 など
オフセット(位置シフト)の主な要因:
- 低速での走行
- マルチパス環境
- DOP値が高い(衛星配置の影響)
- 車速パルスの解像度が低い
- 低pAcc(位置精度) など
これらを改善させるためのいくつかの方法を紹介します。
■位置飛びを軽減するためのGNSSパラメーター設定変更例(UBX-CFG-NAV5):
① 最小仰角(Min SV Elevation)を変更する:5 → 約15[deg]に変更
② Static Hold Threshold を変更する:0 → 約1[m/s]に変更
(弱信号化の環境で定点固定にもかかわらずに取得位置が安定しない場合に定点での安定性が向上します)
移動速度を1m/s未満と判断した時:NMEA Message:固定位置で出力, UBX Message:固定位置で出力
移動速度を1m/s以上と判断した時:NMEA Message:測位結果を出力, UBX Message:測位結果を出力
③ P Accuray Mask を変更する:100 → 約20[m]に変更
(弱信号化の環境で定点固定にもかかわらずに取得位置が安定しない時に有効です)
P Accuracy Maskが20 [m] よりも大きい時の動作
NMEA Message ⇒ 測位結果はマスクされる
UBX Message ⇒ 測位結果はマスクされずに出力。内部FlagがNo Fixとなるので、位置飛び判定する。
④ Min C/Noを変更する:0 → 約20もしくは約30[dBHz]に変更
(精度の良い衛星で測位計算をすることになります)
上記設定は測位が遅くなる等のトレードオフがありますが、位置飛び等に関しては緩和される方向になります。
■ハードウェア検討
GNSS受信機以外にも、アンテナの設置位置や種類が測位精度に影響するため、これらの見直しも重要です。
まとめ:EVK-M8L/M8Uがもたらす開発効率と精度向上
u-blox社の車載GNSS製品向け評価キットEVK-M8L/M8Uは、開発初期の評価から走行テストまで対応可能で、車載ナビゲーションシステムへのGNSSの実装を効率的に行える実用性の高いツールです。都市部やトンネルなど、GNSS信号が不安定な環境下でも安定した測位性能を確認できるため、実環境での評価に非常に適しています。EVK-M8L/M8Uの導入をご検討の方は、ネクスティ エレクトロニクスまでお気軽にお問い合わせください。
関連情報・お問い合わせ先
取扱いメーカー:u-blox AG
https://www.nexty-ele.com/product/u-blox/
ユーブロックス社
https://www.u-blox.com/en