
- Analog Devices, Inc.
- NEXT Mobility
位相余裕を直観的に理解する!
はじめに
初めにイメージをつかんで頂くために「位相余裕」について、身近な例を使って説明して行きたいと思います。
オンラインゲームをプレイしているとき、通信のラグなどによって思い通りに操作できなかった経験はありませんか?
例えば、自キャラクターを操作してコース通りに走る場面を想像してください。
もし、操作がゲームに反映されるまでに1秒の遅延時間があるとしたらどうなるでしょうか。
左カーブが見えた瞬間に左に曲がる操作をしても、ゲーム内では1秒後にその操作が反映されるため、プレーヤーは左に曲がる操作を続けます。次に左カーブから右カーブに切り替わったとき、右に曲がる操作をしても、やはり1秒の遅延時間があるため、自キャラクターは左に曲がり続けてしまいコースアウトしてしまいます。
この1秒の遅延時間が短くなればなるほど、操作とゲーム内の動きが一致しやすくなり、スムーズに操作できるようになり、コースアウトを防ぐことができるのです。
この「遅延時間」は、制御工学における「位相余裕」と密接な関係があります。システムへ任意の周波数を入力した際に出力に反映するまでの遅延時間がある場合、出力には位相遅れとして現れます。
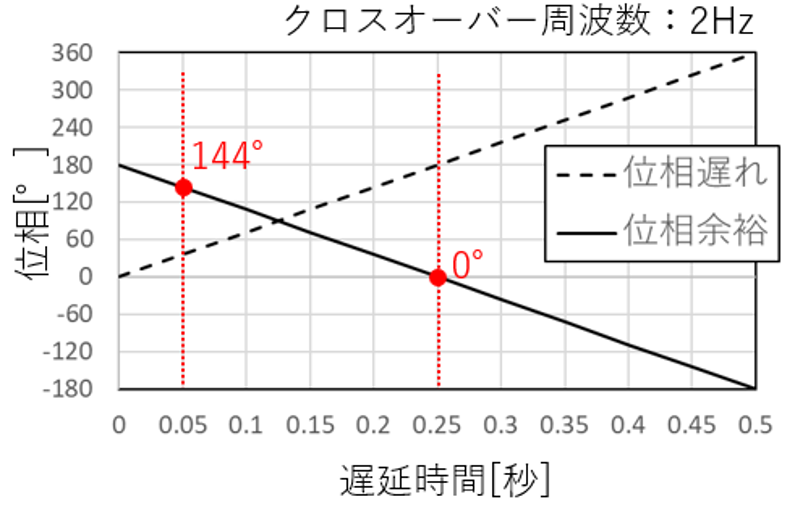
図 1 遅延時間と位相余裕
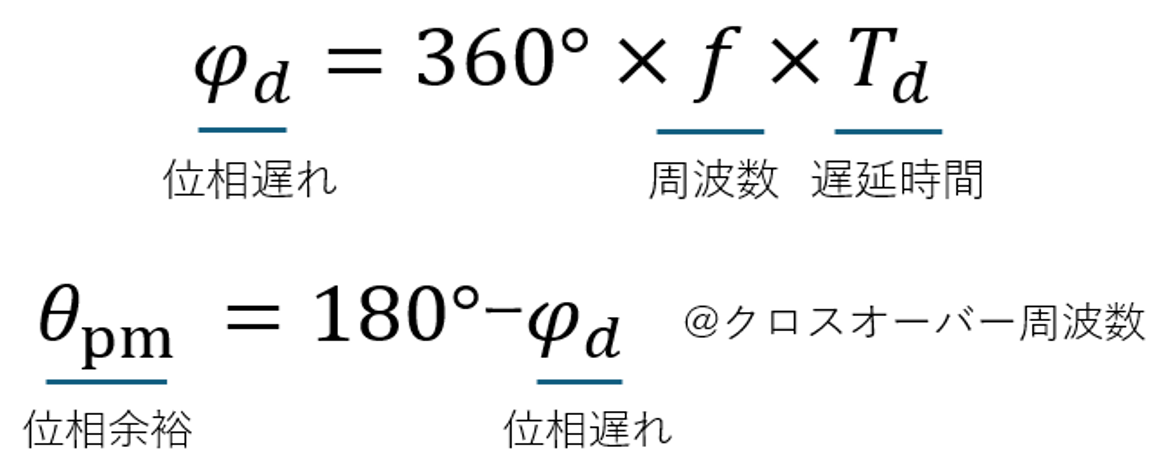
図1は遅延時間が増加するほど位相遅れが増加、位相余裕が減少する様子を表したグラフです。
この「周波数」は、左右のカーブを曲がる操作(左右のカーブを1セット1回とカウント)を1秒間に何回繰り返すか、つまり操作の変化の速さを表しています。そして、位相余裕を計算する際のクロスオーバー周波数は、1秒間に自キャラクターを左右に操作してカーブを曲がることができる限界の操作速度と考えてみてください。
たとえば、1秒間に左右のカーブを曲がる操作を2回繰り返す(=2Hz)のが限界だとします。このとき、遅延時間が0.05秒であれば、自キャラクターをそれなりに意図通りに操作でき、コースアウトすることは少ないでしょう。この時の位相余裕は144°です。
しかし、遅延時間が0.25秒になると、位相遅れは180°となり、操作と反応が完全に逆になる状態になります。この時の位相余裕は0°です。左カーブに入るタイミングで左に曲がる操作をしても、実際に自キャラクターが左に曲がり始めるのは、、すでに右カーブに入ってからになります。この状態では確実にコースアウトしてしまうでしょう。
このように考えると、位相余裕とは「自キャラクターをどれだけ意図通り、余裕をもって操作できるか」の尺度であることが、直感的に理解できるのではないでしょうか。
ポイント:
- クロスオーバー周波数で遅延時間が少ないほど位相余裕は大きい!
- 位相余裕は意図通りに操作できるかの尺度で大きいほど余裕がある!
LT8624Sのリンク
LT8624Sの特長
LT8624Sは第3世代のSilent Switcher技術が搭載されており、大きな3つの特長があります。
1. 低い周波数帯域での低ノイズ
・0.1Hz~100kHzという非常に低い周波数帯域でもノイズが少ない
・出力電圧に関係なく出力ノイズがほぼ一定
2. 低EMI
・高速スイッチング(最大6MHz)でもEMI(電磁ノイズ)を最小限に抑える
・内蔵バイパスコンデンサーや対称レイアウトにより、放射ノイズを劇的に低減
3. 高周波で高い効率
・同期整流方式により、高い変換効率を実現
・最小オン時間が短く、高速応答が可能
出力電圧を安定化する方法:フィードバック制御
制御の概要
LT8624Sは出力の電圧を狙った値にするために出力電圧監視して安定化するフィードバック制御を用いています。
図
2はLT8624Sのデータシート28ページに記載されている出力電圧フィードバック制御のブロック図です。
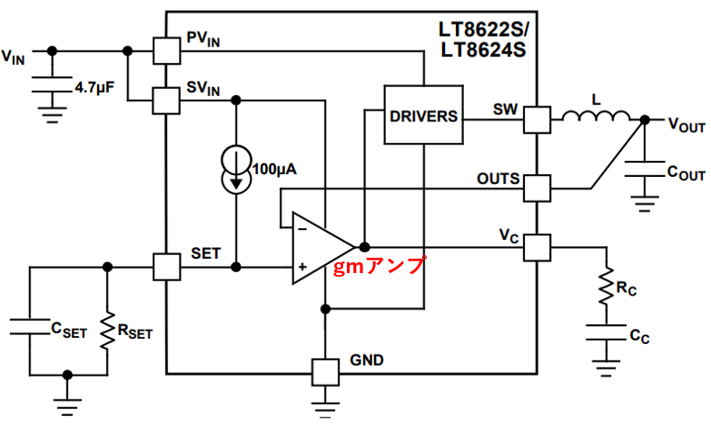
図 2 出力電圧フィードバック制御
このフィードバック制御で出力電圧をどのように安定化しているかを見ていきましょう。
① OUTS端子に出力電圧VOUTが入力され、gmアンプの反転入力に接続されます。
② SET端子から100μAの電流がRSETとCSETの並列回路に流れ、SET端子に電圧が発生します。
→このSET端子の電圧が、出力電圧VOUTの目標値となります。
③ SET端子の電圧は、gmアンプの非反転入力に入力されます。
④ gmアンプの出力から、(SET端子電圧 − OUTS端子電圧)× gm
に相当する電流がVC端子へ流れ、RCとCCの直列回路を流れてVC端子に電圧が発生します。
→OUTS端子電圧がSET端子電圧(=VOUTの目標値)より低い場合、VC端子に正の電流が流れ、VC端子電圧は上昇します。
OUTS端子電圧がSET端子電圧より高い場合、VC端子から電流が吸い込まれ、VC端子電圧は下降します。
⑤ VC端子電圧はDRIVERSに入力され、SW端子からVC端子電圧に応じたPWM波形が出力されます。
→VC端子電圧が高いほどPWM波形のデューティ比は大きくなり、低いほど小さくなります。
⑥ SW端子に接続されたインダクタLとコンデンサーCOUTによってPWM波形が平滑化され、出力電圧VOUTが得られます。
→PWM波形のデューティ比が大きいほど出力電圧VOUTは上昇し、小さいほど低下します。
このようなフィードバックループを構成することによってSET端子電圧(=VOUTの目標値)と出力電圧VOUTを比較し、VOUTがVOUTの目標値よりも大きければVOUTを下げ、小さければ上げる制御を繰り返します。
このような仕組みで出力電圧を安定化しています。
先ほどのオンラインゲームの例でも類似した制御を行っています。
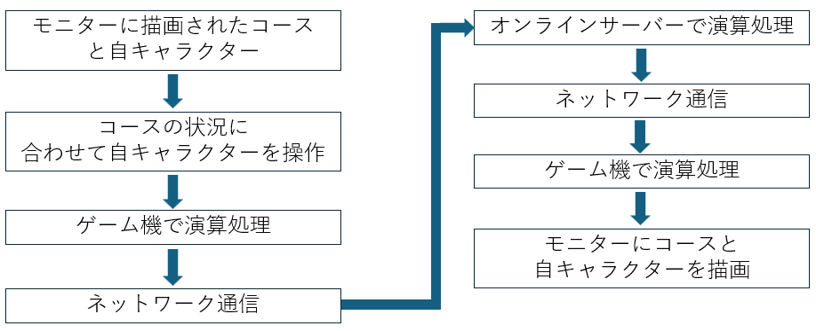
図 3 オンラインゲームでの制御例
図3の『コース状況に合わせて自キャラクターを操作』のブロックで、コースに沿って自キャラクターを操作する制御は、LT8624Sの制御のVOUTの目標値と出力電圧VOUTを比較してVOUTを調節する制御と同様な動作をしていると考えられます。
先ほど、『クロスオーバー周波数で遅延時間が少ないほど位相余裕は大きい!』と言うポイントを解説しました。図
4のLT8624Sのブロック図で遅延時間が発生している箇所はどこになるのでしょうか。
答えは赤枠で囲われたAとβのブロックになります。
AのブロックではVC端子電圧に応じたPWM波形を生成して、LCフィルターで平滑化する際に遅延時間が発生します。
βのブロックではRCとCCの直列回路でgmアンプの出力電流をVC端子電圧に変換する際に遅延時間が発生します。
低周波領域ではCCのインピーダンスがRCと比較して大きくなり、RCとCCの直列回路の合成インピーダンスはCCのインピーダンスが支配的になります。
そのためCCの充電時間相当の遅延時間が発生します。高周波になるとCCのインピーダンスがRCと比較して小さくなり、RCとCCの直列回路の合成インピーダンスはRCのインピーダンスが支配的になります。そのため遅延時間はほとんど発生しません。
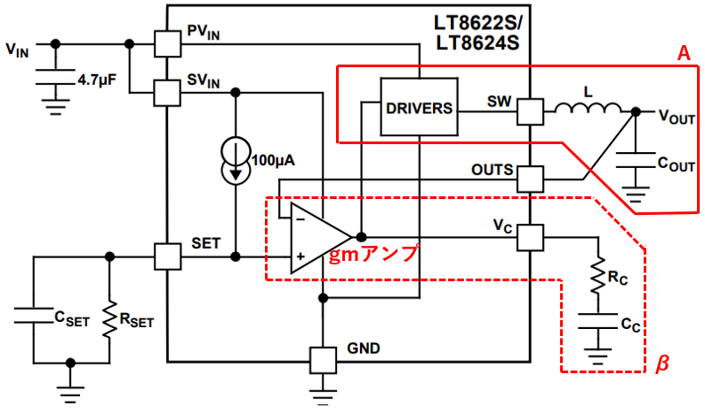
図 4 遅延発生箇所
LTspiceを用いたシミュレーション
制御工学ではクロスオーバー周波数はゲインが0dBの時の周波数と定義しています。オンラインゲームの例におけるクロスオーバー周波数は1秒間に自キャラクターを左右に操作してカーブを曲がることができる限界の操作速度と考えてみてくださいと書きました。
同じようにイメージで考えてみたいと思います。クロスオーバー周波数は出力電圧が0.1V低下した時に0dBつまり1倍=0.1V出力を上げるような制御ができる周波数です。
これ以上の周波数では0.1Vの低下に対して出力を0.1V未満で上げる制御になってしまうため目標の電圧を維持できません。そのためクロスオーバー周波数は出力電圧を適切に補正できる限界の周波数と言えます。
それではクロスオーバー周波数でβのブロックでの遅延時間を小さくするために、CCの静電容量を大きくしてCCのインピーダンスを下げてみましょう。
図 5はアナログ・デバイセズ社が無償で提供している回路シミュレーターLTspiceでフィードバック制御のボード線図をシミュレーションしたものです。
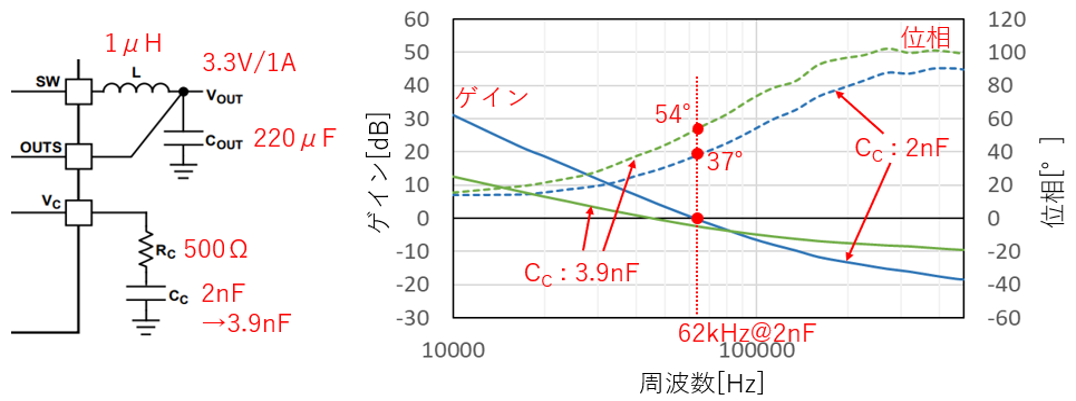
図 5 ボード線図(CC増加)
クロスオーバー周波数でRCとCCの直列回路の合成インピーダンスの内CCのインピーダンスの影響を小さくして遅延時間を低減するために、CCの静電容量を2nFから3.9nFに増やしてみると、2nFの時のクロスオーバー周波数62kHzの位相余裕は37°から54°(遅延時間6.4μsから5.6μs)に増加しており遅延時間が少なくなっていることがわかります。
しかしよく見るとCCの静電容量が3.9nFの時、ゲインも低下しておりクロスオーバー周波数が低くなってしまっています。これはクロスオーバー周波数でのCCのインピーダンスが下がりRCとCCの直列回路の合成インピーダンスも下がったため、gmアンプ出力電流をVC端子電圧に変換する際の変換ゲインが下がったことによるものです。
合成インピーダンスを上げるためにRCの抵抗値を増やしてみましょう。
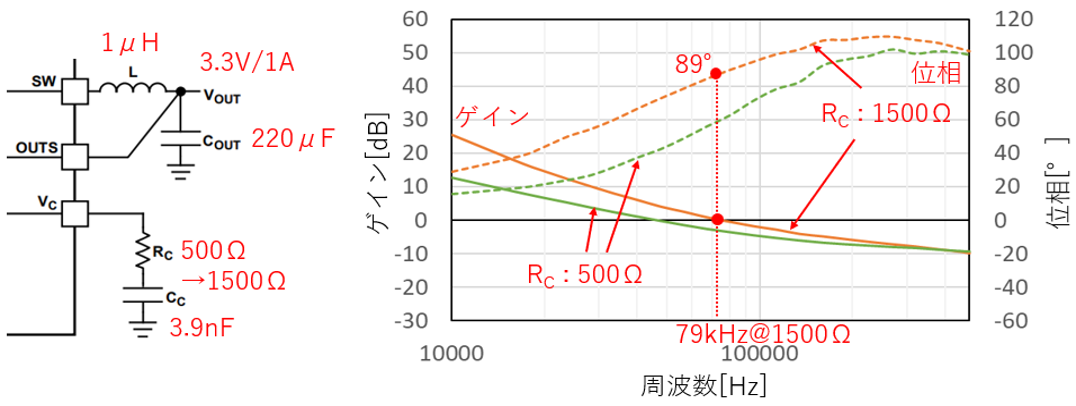
図 6 ボード線図(RC増加)
図6はRCの静電容量を500Ωから1500Ωに増やした時のボード線図です。ゲインが上昇してクロスオーバー周波数が高くなったことがわかります。
このようにRCとCCの直列回路の合成インピーダンスを調節することでクロスオーバー周波数を62kHzから79kHzに、位相余裕を37°から89°に改善することができました。
電源の制御ではクロスオーバー周波数を高くするとより高周波の外乱に対して安定性が増します。
例えば、より高周波成分を含むステップ状の負荷電流の変化に対して出力電圧の変化量が少ないと言った具合です。
また位相余裕を60°以上確保するとステップ状の負荷電流の変化に対して出力電圧のリンギングの大きさと持続時間が小さくなります。
フィードバック制御の改善をする際は、ステップ状の負荷電流の変化に対して期待する電圧の変化をイメージすると良いと思います。
LT8624Sの開発リソース
LT8624Sの開発リソースをご紹介します。
評価ボード
■EVAL-LT8624S
-
https://www.analog.com/jp/resources/evaluation-hardware-and-software/evaluation-boards-kits/eval-lt8624s.html#eb-overview
LT8624Sを搭載した入力電圧2.7~18V、出力1V/4Aの同期整流式降圧電源です。
シミュレーションツール
■LTspice
LTspiceは高速、無償の回路シミュレーターです。今回電源のボード線図の作成にはLTspice®
24の新しい特長である周波数応答解析(FRA)機能を使用しました。
詳しい解説は下記リンクのウェビナー(英語)をご視聴ください。
まとめ
直感的に位相余裕を理解していただくために解説した内容を表
1にまとめました。
制御工学では周波数領域でさまざまな制御を扱いますので周波数領域での理解が必須ですが、直観的な理解は身近な時間領域に置き換えて考えてみると良いと思います。
| 項目 | オンラインゲーム | 電源 |
|---|---|---|
| 時間遅延の原因 | 通信ラグなど | A、βの位相遅れ |
| クロスオーバー周波数 | 1秒間あたりの限界操作回数 | ゲイン0dBの時の周波数 |
| 位相余裕 | スムーズな操作感の尺度 | 外乱に対する安定度 |
| 改善対策 | 通信ラグの改善 | βのブロックのRCとCCの調整 |
LT8624Sの部品情報検索
お問い合わせ
関連製品情報

RF製品の電源供給にも使用できるほど低ノイズのスイッチング・レギュレーター
Silent Switcher 3は、低い低周波ノイズと高速な負荷応答特性を実現した最新のスイッチング・レギュレーター技術です。
- Analog Devices, Inc.
- ICT・インダストリアル

AI機械学習がモーターを診断スマートモーターシステム
ADI OtoSenseスマート・モーター・センサーで、閾値設定から分析・診断、原因特定までAlに任せ、ダウンタイムを防いで、ロスを回避しましょう。
- Analog Devices, Inc.
- NEXT Mobility
- ICT・インダストリアル
- スマートファクトリー・ロボティクス

新LTspice③パラメトリック解析、公差解析
LTspiceはアナログ・デバイセズ提供の無償SPICEシミュレーターです。パラメトリック解析や公差解析の手法、ドットコマンドの使い方を紹介します。
- Analog Devices, Inc.
- NEXT Mobility
新 LTspice②SPICEモデル使用方法
LTspiceは、アナログ・デバイセズが無償で提供するSPICEシミュレータです。デモ回路の入手方法や各モデルを紹介します。
- Analog Devices, Inc.
- NEXT Mobility
新LTspice完全ガイド①
LTspiceとは、アナログ・デバイセズが無償で提供するSPICEシミュレータです。バージョンアップしたLTspice24の変更点や性能を解説します。
- Analog Devices, Inc.
- NEXT Mobility

ワイヤレスジェスチャーセンサーのご紹介 (アナログ・デバイセズ製品ユースケース)
ネクスティ エレクトロニクスが開発した、ワイヤレスタイプのジェスチャーセンサーは、低コストで遠隔での家電やディスプレイ製品の制御に対応できます。
- Analog Devices, Inc.
- NEXT Mobility
- ICT・インダストリアル
- スマートファクトリー・ロボティクス