Livox Viewer 2は、Livox社が提供するLiDAR*データ解析用のソフトウェアです。
本ソフトウェアはGUIベースの操作により、LiDAR点群データの3D表示やフィルタリングを数クリックで実行可能です。
この記事では、Livox Viewer 2の基本機能から応用設定までを、豊富な画像とともにわかりやすく解説します。
初めての方でもすぐに使いこなせる内容です。
*Light Detection and Ranging:光学的に物体の検知と測距が可能な装置
Livox Viewer 2の概要
本ソフトウェアは、Livox製の各種LiDARデバイス(MID-360)に対応しており、取得した点群データをリアルタイムに3D表示・解析できます。
これにより、周囲環境の3Dモデルの確認や、センサー性能の評価が容易になります。
また、点群データの補正や保存、データ変換も可能なため、Livox LiDARを活用する際に非常に便利なツールです。
Livox Viewer 2は以下の公式サイトからダウンロードできます。
是非、本記事を参考に点群データを可視化してみて下さい!
画面上部には、さまざまな機能を操作するためのメニューバーが表示されます。
メニューバーは、基本操作・表示設定・高度設定の3つのカテゴリーに分かれており、それぞれの役割を順に解説します。
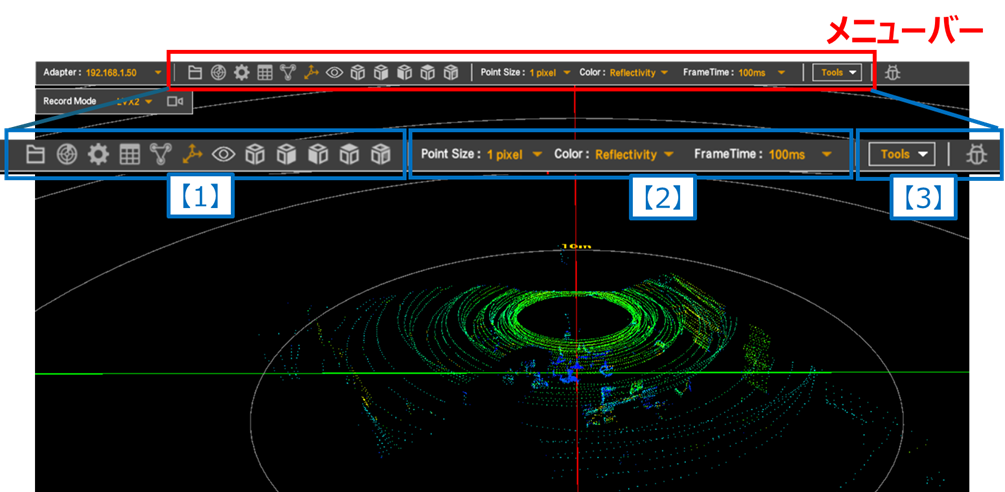
メイン画面とメニューバー
Livox Viewer 2の主な機能と操作メニュー
メニューバー【1】:基本操作

メニューバー【1】
① Open File:保存済みの点群データファイルを読み込み、3D表示を開始する
② Device List :接続されているLiDARデバイスの一覧を表示する
③ Settings:LiDARデバイスや点群データの設定を変更する
④ Spread Sheet:選択した点群データの詳細情報を表形式で表示する
⑤ Extrinsic Param:LiDARデバイスの外部パラメーター(位置、角度)を変更する
⑥ Grid Map:Grid(座標系)を表示する
⑦ Focus PointCloud:点群を画面の中心に移動する
⑧ View:即座に視点を切り替える
メニューバー【2】:表示設定

メニューバー【2】
① Point Size:点群データの点の表示サイズを調整する
② Color:点群データの色を変更する
③ Frame Time:フレームの統合時間を設定する
メニューバー【3】:高度設定
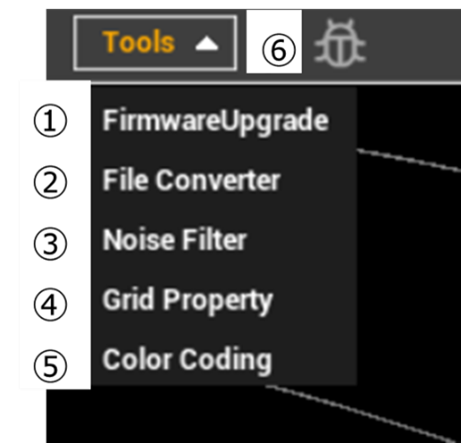
メニューバー【3】
① Firmware Upgrade:デバイスのファームウェアをアップデートする
② File Converter:データファイル形式を変換する(Lvx2 → Csv、Las、Pcd)
③ Noise Filter:ノイズを除去する
④ Grid Property:グリッドの表示設定を変更する
⑤ Color Coding:点群データの色を変更する
⑥ Debug Setting:デバッグのレポートを送信する
各機能の詳細と活用ポイント
ここからは、Livox Viewer 2の各機能について、実際の画面とともに詳しく解説していきます。
メニューバー【1】:基本操作
① Open File
保存済みの点群データ(対応形式:Lvx2、CSV)を読み込み、3D表示を開始します。
② Device List
接続中のLiDARデバイスを一覧表示し、個別に接続・切断や点群の表示切り替えが可能です。
複数デバイスを扱う開発環境で便利です。
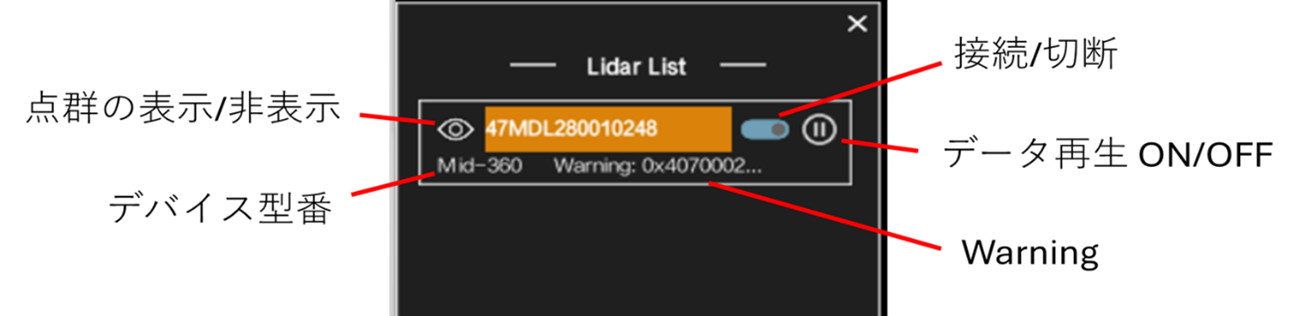
Device List
③ Settings
デバイスの動作モード、視野角(FOV)、IMU表示など、点群データの取得条件を細かく設定できます。
下記画像の★個所がよく使われる機能です。
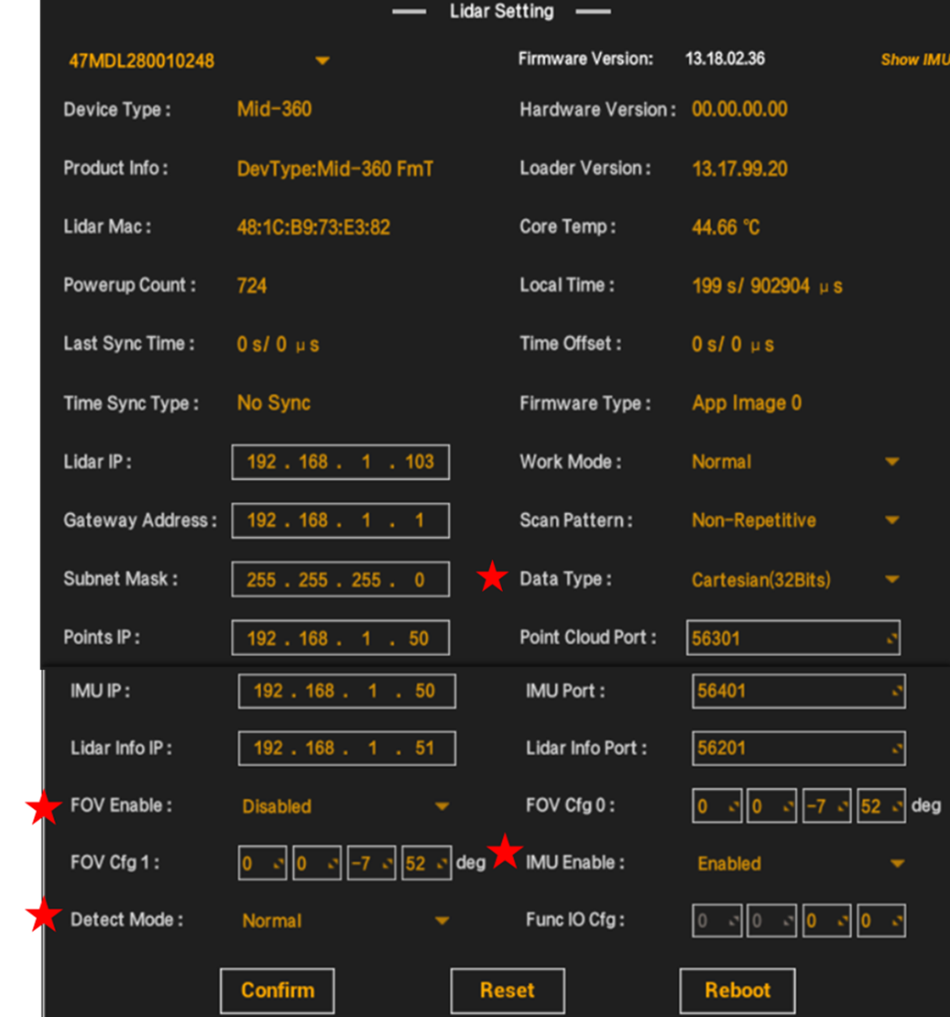
Settings
- Data Type
点群の座標系をCartesian(直交)またはSpherical(球面)から選択可能です。
用途に応じてデータサイズや精度を調整できます。
Cartesian(直交座標系、16 or 32 bit):X、Y、Zの3つの直交する軸を使用して、空間内の点の位置を表現
Spherical(球面座標系):点の位置を半径、極角、方位角の3つの値で表現
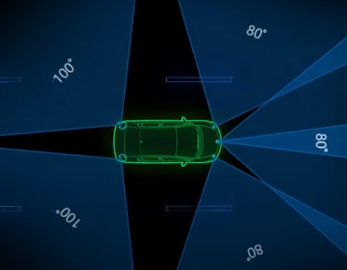
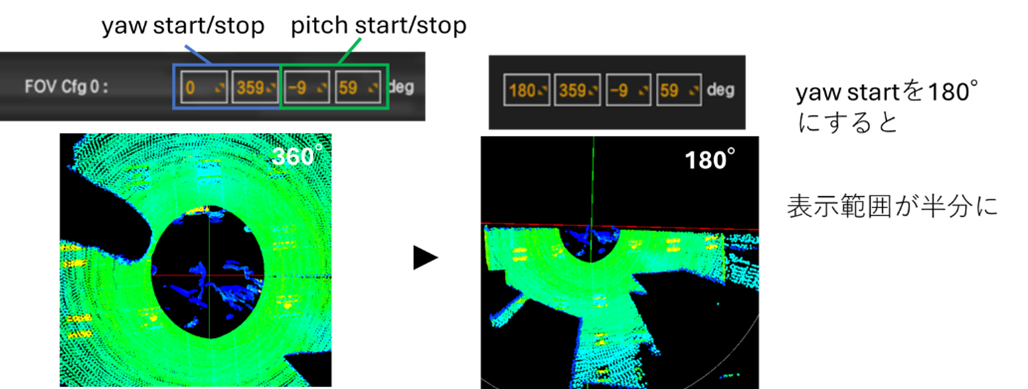
- FOV(Field Of View)
LiDARの検出範囲を制限し、不要なデータを除外することで解析効率を向上させます。
FOV Cfg 0、FOV Cfg 1の2つの範囲を反映できます。
FOV設定
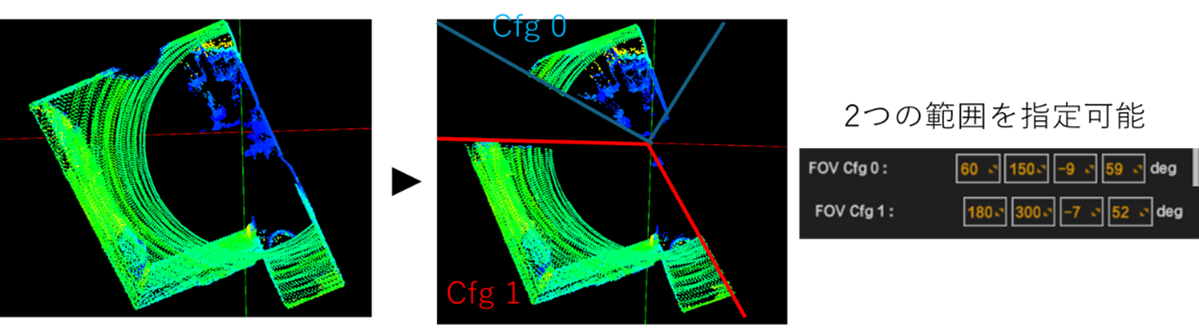
2つの範囲選択
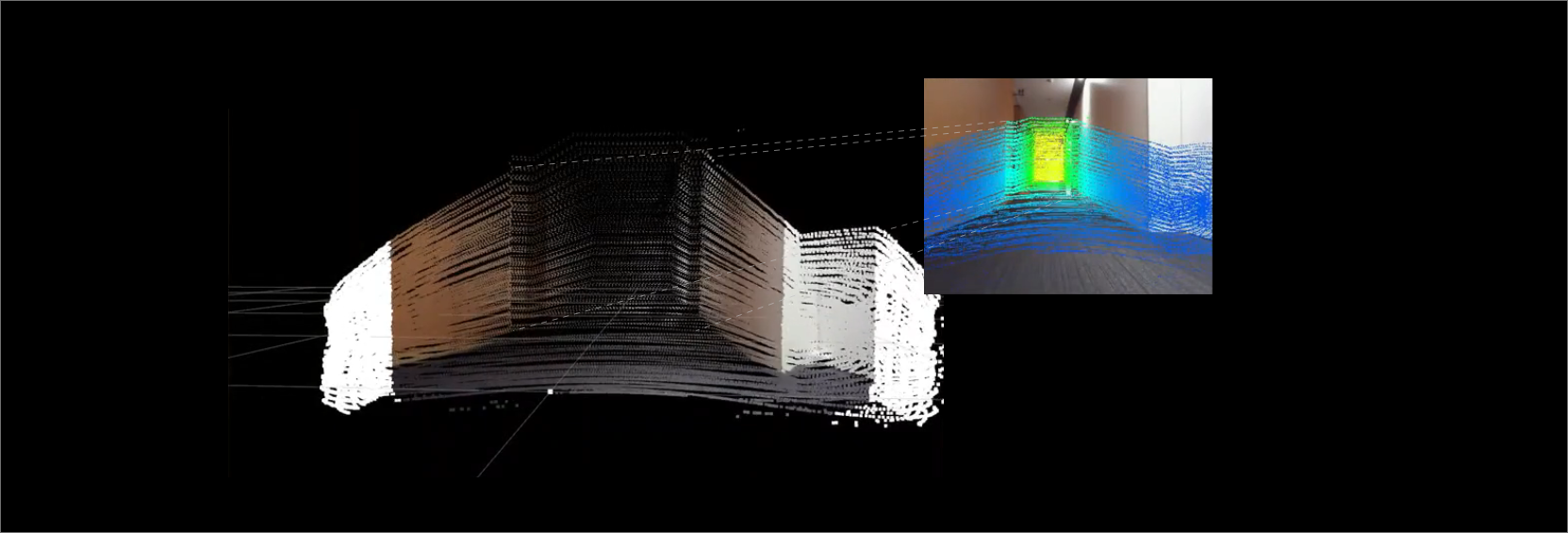
- IMU Enable
慣性計測値(Inertial Measurement Unit)を表示します。
加速度・角速度データを表示し、LiDARの動きや姿勢変化をリアルタイムに把握できます。
移動体搭載時に有効です。
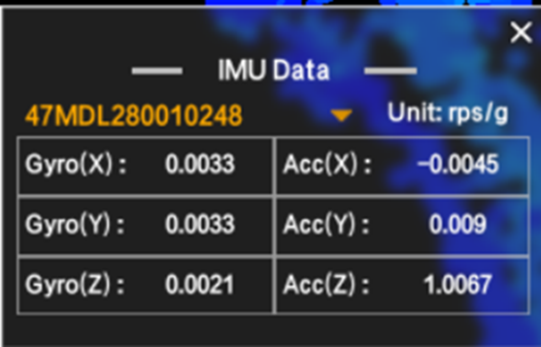
IMU Data(単位 Gyro:rad/s、Acc:g)
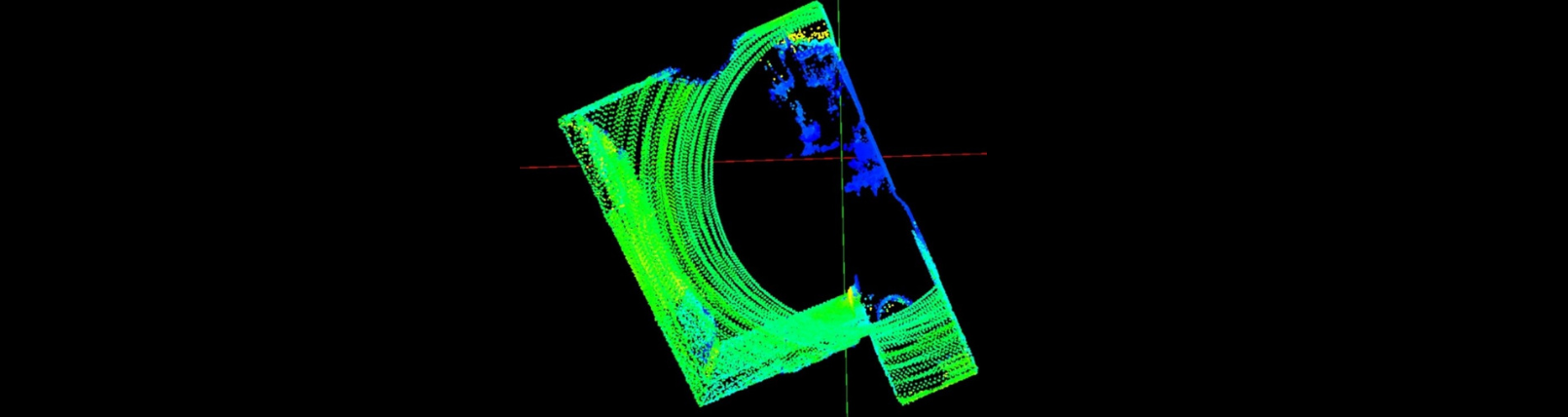
- Detect Mode
低反射物体の検出精度を高めるSensitiveモードを選択可能です。
ただし、ノイズは増加する可能性があります。
④ Spread Sheet
任意の範囲で点群データを選択し、座標・反射率などの詳細情報を表形式で確認可能です。
特定領域の分析に便利です。
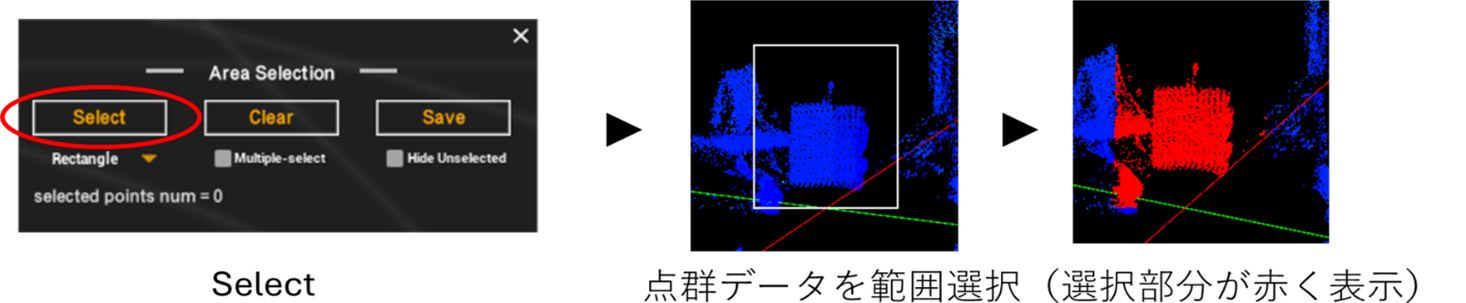
範囲選択
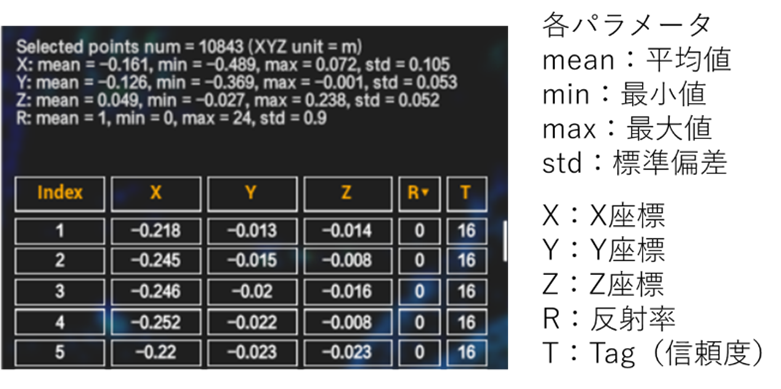
各パラメーター
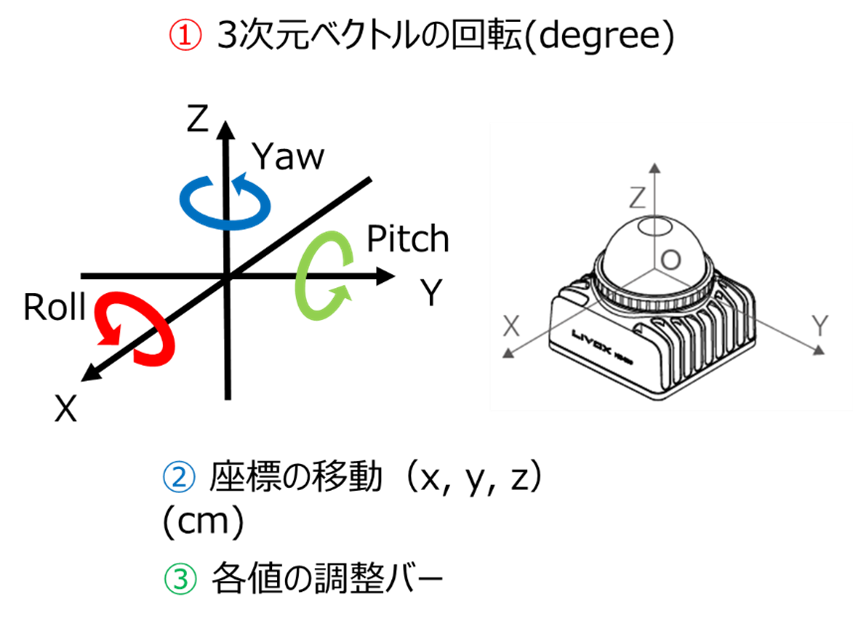
⑤ Extrinsic Param
LiDARデバイスの外部パラメーター(位置、角度)を変更できます。
LiDARデバイスの設置位置や角度を変更した場合、外部パラメーターを調整することで点群の原点や座標軸を修正できます。
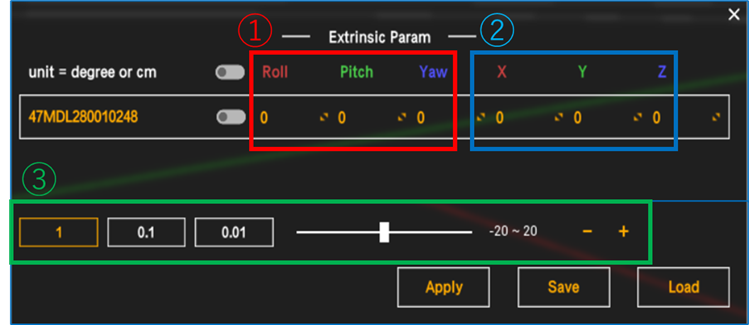
Extrinsic Param
⑦ Focus PointCloud
即座に点群を画面の中心に移動させます。
⑧ View
各アイコンをクリックすることで、上面・側面・斜めなど点群データを見る角度を即座に変更できます。
メニューバー【2】:表示設定
① Point Size
点群の表示サイズを1〜5ピクセルで調整可能です。
密度の高いデータや遠距離の点群を見やすくする際に有効です。
② Color
点群データの表示色を変更できます。
- Reflectivity:反射率による色分け
- Distance:直線距離による色分け
- Solid Color:すべて白色で表示
- Elevation:高さによる色分け
- Lidar ID:LiDARデバイスごとに任意の色で表示
Reflectivity、Distance、Elevationは最大・最小値を設定してグラデーション調整が可能です。
③ Frame Time
Frame Time:点群データの統合時間を100〜3000msの範囲で調整可能です。
短く設定するとリアルタイム性が高まり、長く設定すると密度の高い点群が得られます。
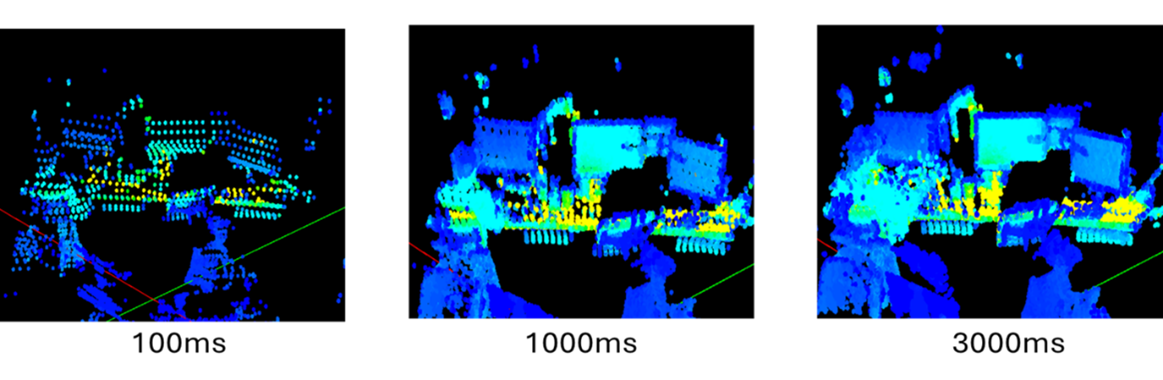
Frame Time
メニューバー【3】:高度設定
① Firmware Upgrade
ファームウェアを最新バージョンに更新します。
② File
Converter
Livox独自形式(Lvx2)で保存された点群データを、他ソフトウェアで利用可能な形式(CSV、LAS、PCD)に変換できます。
CSV:汎用性の高いテキスト形式。Excelなどで編集可能
LAS:LiDAR業界標準のバイナリ形式。GISソフトで利用
PCD:Point
Cloud Library(PCL)対応形式。研究用途に最適
③ Noise Filterbr
点群データから不要なノイズを除去する機能です。環境に応じて以下のフィルターを選択可能です。
- Atmospheric Cluster Noise:ほこり、雨、霧、雪などのノイズを除去(Strong:Tagが1 or 2、Weak:Tagが2)
- Dragging Noise:近接物体間の信号融合による歪みを除去(Strong:Tagが4 or 8、Weak:Tagが8)
- Other:LiDAR近傍(80cm以内)の誤検出を除去(Strong:Tagが16 or 32、Weak:Tagが32)
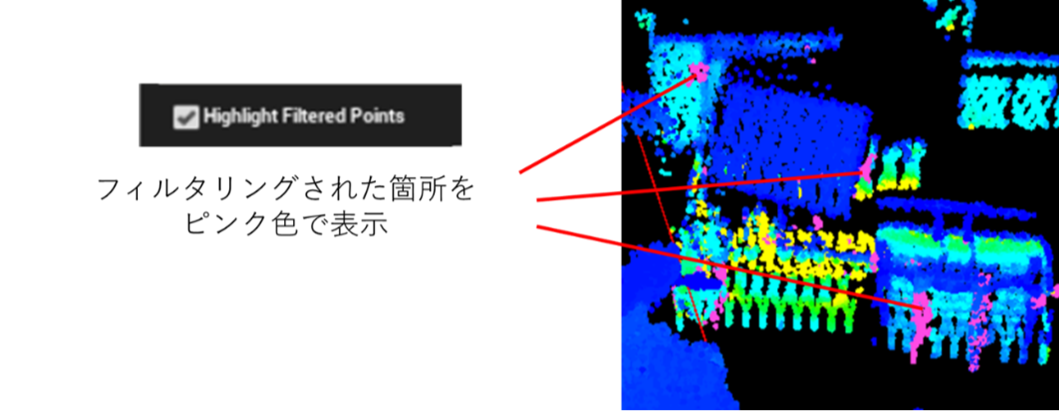
Noise Filter-Highlight Filtered Points
『Highlight Filtered Points』を有効にすると、除去対象がピンク色で表示され、確認が容易になります。
④ Grid Property
点群の空間位置を把握しやすくするための座標グリッドの表示設定です。
形状・色・範囲を調整して、解析環境に合わせた視認性を確保できます。
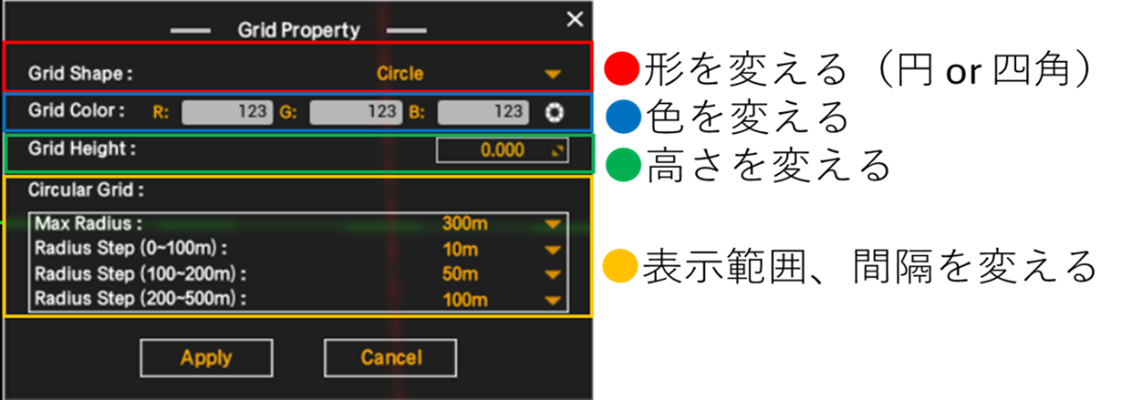
Grid Property
⑤ Color Coding
複数のLiDARデバイスから取得した点群を、デバイスごとに色分け表示します。
識別性を高め、データの整理に役立ちます。
⑥Debug Setting
動作不具合やバグ発生時に、ログ情報を開発チームへ送信する機能です。
トラブルシューティングや改善要望の提出に活用できます。
まとめ
Livox Viewer 2は、Livox製LiDARの性能を最大限に引き出すための、可視化・解析・変換機能を備えた高機能ツールです。
可視化・解析・変換・ノイズ除去などの機能により、研究開発から実証実験、現場検証まで幅広く活用できます。導入初期から本格運用まで、あらゆるフェーズで役立つツールです。
まずはLivox Viewer 2をダウンロードし、実際に点群データを表示・操作してみましょう。操作性の高さと機能の豊富さを実感できるはずです。
今後もLivox Viewer 2の新機能やアップデートに注目し、より高度なデータ活用を目指していきましょう。
関連情報
・Livox社の主要製品
・Livox Viewer 2 マニュアル