

- Livox Technology Company Limited
- NEXT Mobility
- スマートファクトリー・ロボティクス
Livoxは、LiDARテクノロジーの可能性を最大限に引き出すことにより、自律的な世界を加速することに取り組んでいます。 高度なセンサーユニットのラインで、私たちは企業や開発者にこのテクノロジーをプロジェクトやプラットフォームに組み込むための信頼できるルートを提供します。当社のLiDARセンサーは、高性能で手頃な価格ですぐに使用でき、業界を変えて未来を展望する力を備えています。
Livox 3D-LiDAR 製品情報
| TELE-15 | MID-70 | AVIA | Mid-360S | |
|---|---|---|---|---|
| モデル | 
| 
| 
| 
|
| レーザー波長 | 905 nm | |||
| 安全等級 | クラス 1(IEC60825-1:2014) | |||
| 範囲 (@100キロルクス) | 180 m @ 反射率10% | 90 m @ 反射率10% | 190 m @ 反射率10% | 40 m @ 反射率10% |
| 500 m @ 反射率80% | 260 m @ 反射率80% | 320 m @ 反射率80% | 100m 最大測定距離 | |
| FOV | 15° 円形 | 70.4°円形 | 70.4°(水平) × 77.2°(垂直) | 360°(水平) × 59°(垂直) |
| 走査方法 | 非反復走査 | 非反復走査 | 非反復走査 ⁄ 反復走査 | 非反復走査 |
| データサイズ | 240,000 点 ⁄ 秒 | 100,000 点 ⁄ 秒 | 240,000 点 ⁄ 秒 | 200,000 点 ⁄ 秒 |
| 動作環境温度 | -40℃ ~ 85℃ | -20℃ ~ 65℃ | -20℃ ~ 65℃ | -20℃ ~ 55℃ |
| IP等級 | IP67 | |||
| インターフェイス | イーサネット | |||
| サイズ | 122 × 105 × 94mm | 97 × 64 × 62.7mm | 91 × 61.2 × 64.8mm | 65 × 65 × 60mm |
| 重量 | 約 1400g | 約 580g | 約 498g | 約 265g |
| WEBプライス | ¥148,000 | ¥92,400 | ¥167,200 | ¥83,600 |
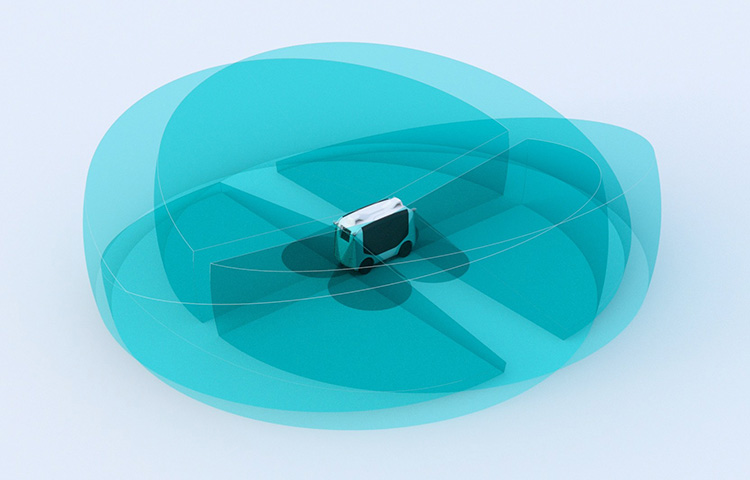
独自の走査パターンが鍵
一般的なMulti-line Spining LiDARと異なり、プリズムを回転させることで、独自のスキャン方式(非反復走査)を行うことにより、 積分時間の増加に伴い、視野カバー率も大きく向上し、視野内のより多くの細部情報を取得することが可能になります。
走査動画
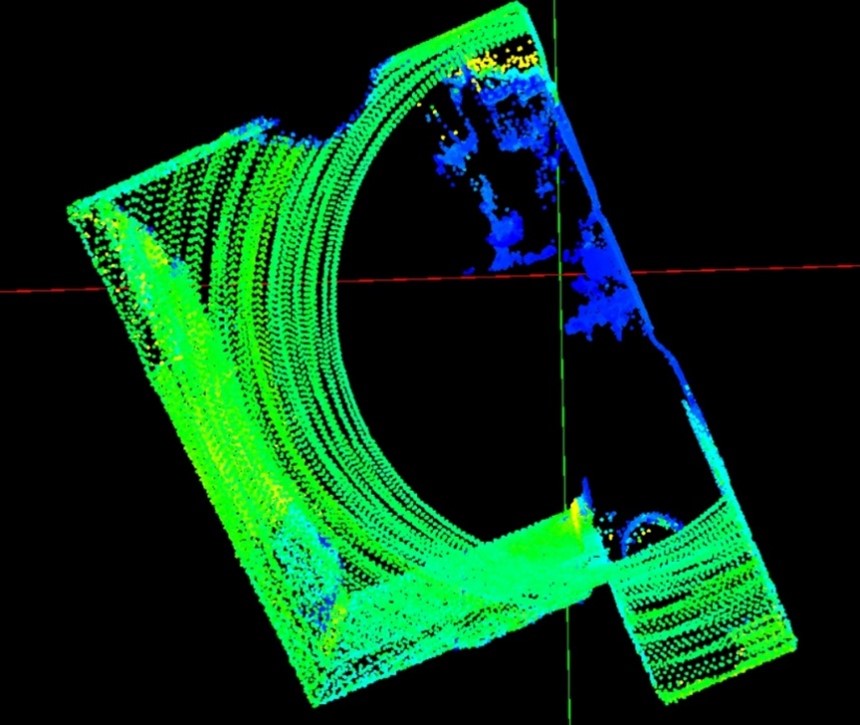
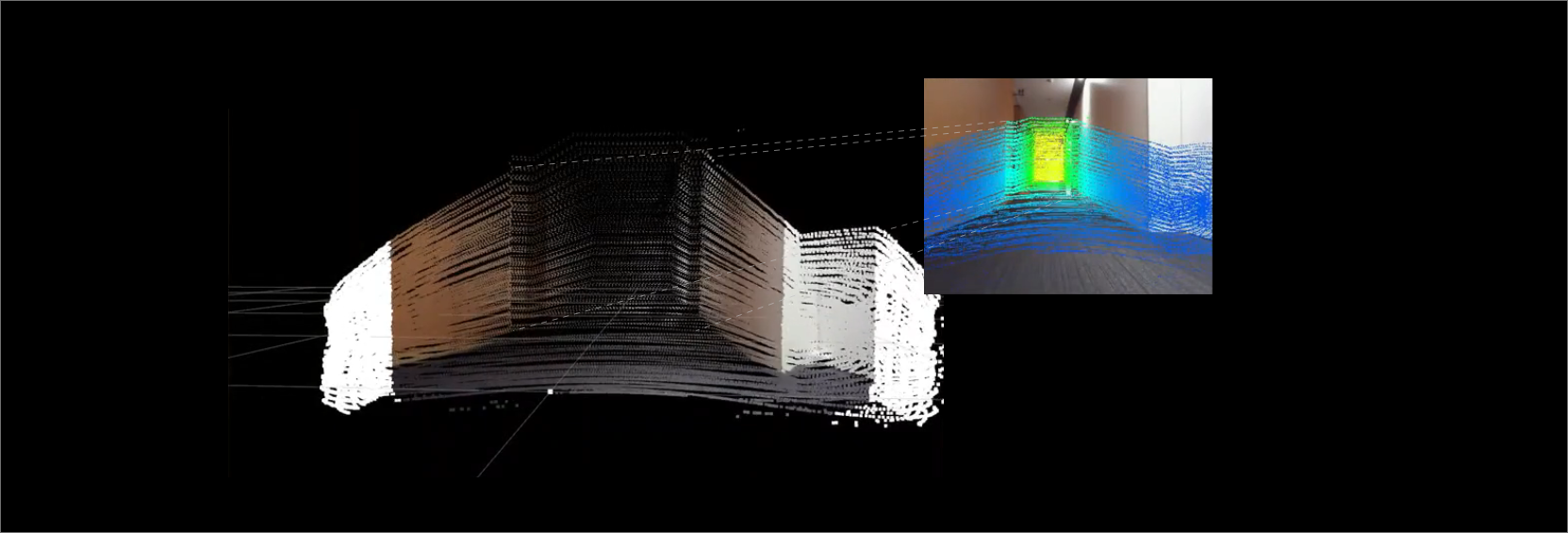
下図は、非反復走査モードにおける異なる積分時間(0.1 秒、0.2 秒、0.5 秒、1 秒)で取得した本製品の点群データを示しています。

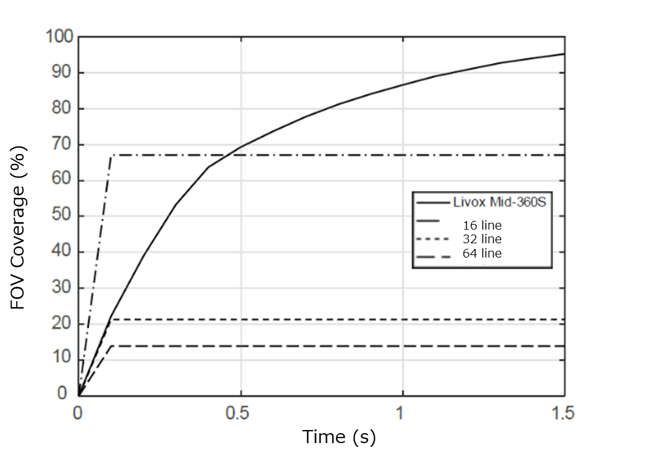
下図では、非反復走査モードにおいて、異なる積分時間条件下での本製品の視野カバー率と、現在市場で一般的に使用されている複数のMulti-line Spining LiDARとの比較を示しています。
図から分かるように、積分時間が 0.1 秒 の場合、本製品の視野カバー率は一般的な 32 線のMulti-line Spining LiDARと同等です。
さらに積分時間を 0.5 秒 まで延ばすと、視野カバー率は 約 70% に達し、視野内の大部分のエリアをカバーできるようになります。
これは、一般的な 64 線のMulti-line Spining LiDARを上回る性能です。
新製品
Mid-360S
Mid‑360Sは、360°全周囲を高密度にセンシング可能なコンパクト3D‑LiDAR「MID‑360」の後継モデルです。
MID‑360の特長である、360°×59°の広視野角、200,000点/秒の高密度点群出力、IP67準拠の堅牢設計、内蔵IMU(ICM‑40609)を継承しながら、測距レンジを拡張。
より広い環境でのSLAM、ナビゲーション、障害物認識に対応します。
筐体サイズ・重量・電気仕様・インタフェイスはMID‑360と共通のため、既存システムへの置き換えが容易で、機構設計やソフトウェアの変更負担を最小限に抑えられます。
実証実験から商用展開、複数台構成や量産用途まで、「MID‑360の次を選ぶならこれ」と位置づけられるスタンダードモデルです。


FOV:360°x59°(-7~52°)
MID-360 vs Mid-360S
Mid‑360Sは、MID‑360の基本性能やサイズ・インターフェースを継承しながら、測距性能とコストパフォーマンスを向上させた後継モデルです。
既存MID‑360搭載システムへの置き換えや、ソフトウェア資産の流用が容易で、用途や導入規模に応じた選択が可能です。
以下では、Mid‑360SとMID‑360の主な仕様や価格の違いを比較しています。

| 項目 | MID-360(販売終了) | Mid-360S |
|---|---|---|
| レーザ波長 安全等級 | 905nm クラス1(IEC60825-1:2014) | 905nm クラス1(IEC60825-1:2014) |
| 範囲(@100キロルクス) |
40m @反射率10% 70m @反射率80% |
40m @反射率10% 100m 最大測定距離 |
| FOV (Field Of View) | 360°(水平)× 59°(垂直) | 360°(水平)× 59°(垂直) |
| Range Precision3 (1σ) | ≤ 2 cm (@10m) ≤ 3 cm (@0.2m) | ≤ 2 cm (@10m) ≤ 4 cm (@0.2m) |
| 走査方式 | 非反復走査 | 非反復走査 |
| データサイズ | 200,000点/秒 | 200,000点/秒 |
| IMU | ICM40609 | ICM40609 |
| 動作環境温度 | -20℃ ~ 55℃ | -20℃ ~ 55℃ |
| IP等級 | IP67 | IP67 |
| インターフェイス | イーサネット | イーサネット |
| サイズ | 65 × 65 × 60mm | 65 × 65 × 60mm |
| 重量 | 約265g | 約265g |
| Motor Slow Mode | × | ○ |
| LivoxViewer2 | 2.4.2 | 2.4.2 |
| SDK2 | 1.3.1 | 1.3.1 |
| livox_ros_driver2 | 1.2.6 | 1.2.6 |
| WEBプライス | ¥91,740 | ¥83,600 |
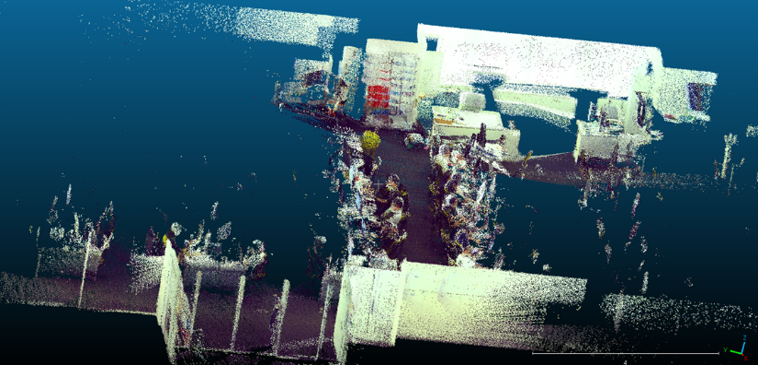
- MID-360採用例
- 場所:深センのショッピングモール
- 特徴: 複雑
- 材質:ガラス、金属、高反射素材
- 移動体:人、ベビーカーなど
- 室内-室外:太陽光干渉
- 環境サイズ:≈150m*60m(9000㎡)
各種用途に応じた3D-LiDARをラインナップ
各種用途の要求(測定距離や視野角等)に対応したラインナップを取り揃えています。
-
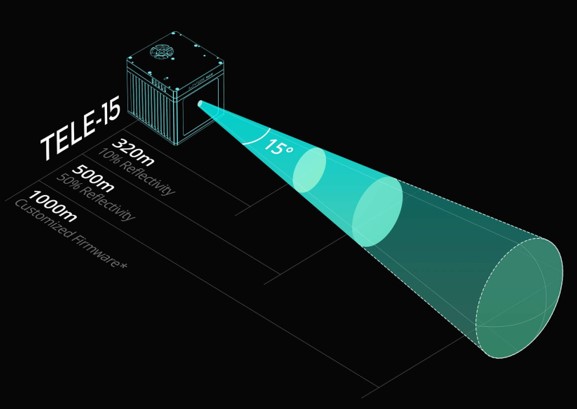
Tele-15
500m@反射率80%
2cm範囲精度
0.1°角度精度
FOV:15°円形 -
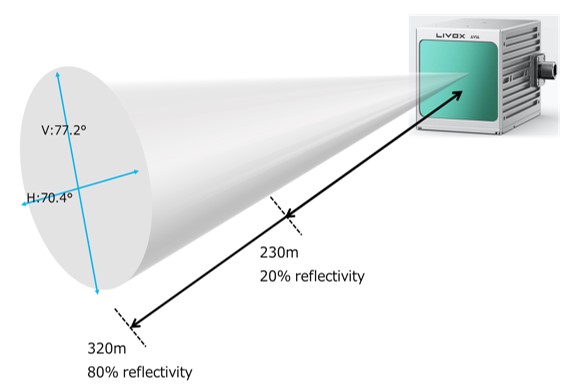
Avia
320m@反射率80%
2cm範囲精度
0.05°角度精度
FOV:70.4°(水平)x77.2°(垂直)
70.4°(水平)x4.5 °(垂直) -
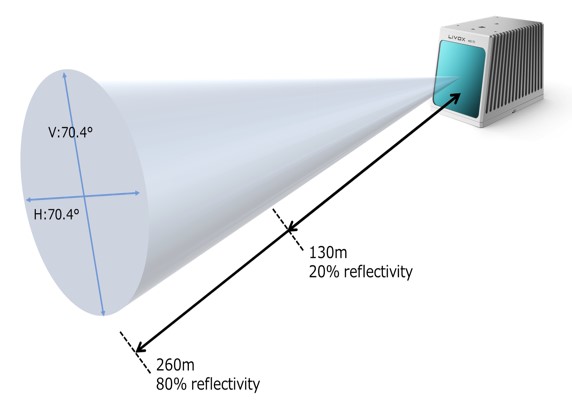
MID-70
260m@反射率80%
2cm範囲精度
0.1°角度精度
FOV:70.4°円形
サクセスストーリー:自動運転芝刈り機への採用
米国 RC Mowers様 の自動運転芝刈り機にMID-70が採用されました!


採用のポイント
- MID-70を前後左右に配置し、障害物検知を低価格で実現。
- 2D-LiDARは、水平方向のみに広い FOV を有しているが、MID-70は垂直方向にも広い FOV(70.4°×70.4°)を有している。
豊富なサンプルプログラム
C、C++、Pythonを使ったサンプルプログラムや、ROS1/ROS2を使った3Dマップデータ作成、自己位置推定、物体検知等のサンプルプログラムがGithubおよび弊社技術コラムに多数公開されています。
これらのサンプルソフトウエアはすべて無償で、ソースコードも開示されており、素早くLiDARの評価を実施することが可能です。
| 題名 | ソフトウェア | URL |
|---|---|---|
| Livox-SDK TELE-15 / AVIA / MID-70用 | SDK (C/C++を使ったサンプル) | https://github.com/Livox-SDK/Livox-SDK |
| Livox-SDK2 Mid-360S用 | SDK (C/C++を使ったサンプル) | https://github.com/Livox-SDK/Livox-SDK2 |
| livox_ros_driver TELE-15 / AVIA / MID-70用 | ROSドライバ | https://github.com/Livox-SDK/livox_ros_driver |
| livox_ros2_driver TELE-15 / AVIA / MID-70用 | ROS2ドライバ | https://github.com/Livox-SDK/livox_ros2_driver |
| livox_ros_driver2 Mid-360S用 | ROS/ROS2ドライバ | https://github.com/Livox-SDK/livox_ros_driver2 |
ネクスティデモ機の紹介
当社ではLivox社製MID-360を使ったデモ機を複数作成しています。
実際に見て、触っていただくことも可能ですので、お気軽にお声がけください。
●自動走行ロボット
-

Osoyoo
-

Kobuki
●カラーマッピングキット

オプション
Livox 3線式航空コネクター
一方の端はM12航空コネクター(メス)、もう一方が電源、イーサネット、機能ケーブルコネクターで構成されています。
同梱物
航空コネクター電源ネットワークポートケーブル×1
仕様
長さ: 1.5 m

Livox M12 航空プラグ延長ケーブル (1m)/(5m)
Livox LiDARユニット本体と、本体に同梱されるケーブルの間に挿入することにより、LiDARの設置場所の自由度を高めます。
1m 延長ケーブル or 5m 延長ケーブル
同梱物
M12航空プラグ延長ケーブル 1m or 5m x1

Livox AC電源アダプター
100~240V ACを12V DCに変換します。
Livox LiDARユニットに電力を供給する場合は、この電源アダプターを使用することをおすすめします。
同梱物
Huntkeyアダプター × 1
AcBel 電源アダプター ACケーブル × 1
電源アダプターコネクター × 1
仕様
入力電圧:100VAC~240VAC、50Hz~60Hz
出力電圧:12 V
定格電力:84 W
動作環境温度:0° ~ 40° C

- Livox 3線式航空コネクターと接続する場合は、コネクタの変更が必要になります。
Livox Technologyオンラインセミナーアーカイブ動画配信中
2022年4月20日 開催
安価で高性能なLivox社3D-LiDARの製品のご紹介及びLiDARを活用したアプリケーション事例、
すぐに使えるサンプルソフトの使用方法を解説いたしました。
質疑応答・発表資料を含めたアーカイブを公開中です。是非ご覧ください。
動画:5セッション 計約2時間
2025年1月17日 開催
安価で高性能なLivox社3D-LiDARの製品ご紹介及びSLAM/物体認識を行うSWパートナー企業様・産業用PCのトータルソリューションを提案します。
質疑応答・発表資料を含めたアーカイブを公開中です。是非ご覧ください。
動画:5セッション

関連技術コラム
-

Livox MID-360 M12ケーブル自作【仕様理解編】
MID-360のM12ケーブル自作に向け、コネクタ仕様と配線設計の基礎をわかりやすく解説します。
-

LiDAR接続トラブルを最短で解消!PC/LiDARのIPアドレス設定・変更ガイド(Windows/Ubuntu/MID-360)
LiDARとPCのIPアドレス設定(Windows/Ubuntu)やMID-360のIP変更手順を解説し、接続不良の原因と対処法を短時間で案内します。
-
Livox 複数制御とROS2ネットワーク設定ガイド
Livox MID-360複数台のネットワーク構成とROS2設定方法を紹介し、信頼性の高い運用をサポートします。
-

ROS2で使う3D-LiDAR MID-360内蔵IMU使い方
MID-360内蔵IMU搭載の3D-LiDARは高精度自己位置推定やSLAMに活用されるセンサー技術です。
-
LiDAR点群データを可視化!Livox Viewer 2の使い方を解説
Livox Viewer 2はLiDAR点群データの3D可視化や解析を行うソフトで、センサー性能評価に活用されます。
-
3D-LiDAR(Livox:MID-360)とTurtlebot2を使った自動走行
Turtlebot2にLivox MID-360を搭載し、3D-LiDARを用いて地図作成、自己位置推定、障害物回避を行い自動走行を実現しました。
-
3D-LiDAR(Livox:MID‐360)を使った3D-MAP作成
3D-LiDAR Livox MID-360を使用して、3D-MAP作成(LIO-Livox)を実装する方法を紹介します。
-
3D-LiDAR(Livox:MID-360)を使った3D-MAP作成「FAST-LIOの実装」
Livoxの3D-LiDAR MID-360を用いた高精度な3Dマップ作成と自己位置推定の実装方法を解説します。
-
3D-LiDAR(Livox:HAP)とカメラのセンサーフュージョン
単眼距離推論技術を用いたLiDARとカメラのセンサーフュージョンで高精度な距離推論を実現します。
-
3D-LiDAR(Livox:MID-360)を使った自己位置推定と移動軌跡の取得
Livox MID-360を用いた自己位置推定と移動軌跡取得の実装方法を解説し、FAST-LIOを活用したナビゲーション技術を紹介します。
お問い合わせ
関連技術コラム

Livox MID-360用ケーブルを自作する【実践編】
Livox MID-360用にM12 12ピンとRJ45を使う自作ケーブルの作り方を示し、配線対応と導通確認手順を解説します。

Mid-360Sの使い方|開封からViewer・ROS 2(RViz)で点群を確認するまで
Mid-360Sの開封後確認から電源・IP設定を行い、ViewerとROS2/RVizで点群表示までの手順を解説します。
Livox MID-360 M12ケーブル自作【仕様理解編】
MID-360のM12ケーブル自作に向け、コネクター仕様と配線設計の基礎をわかりやすく解説します。

LiDAR接続トラブルを最短で解消!PC/LiDARのIPアドレス設定・変更ガイド(Windows/Ubuntu/MID-360)
LiDARとPCのIPアドレス設定(Windows/Ubuntu)やMID-360のIP変更手順を解説し、接続不良の原因と対処法を短時間で案内します。

Livox 複数制御とROS2ネットワーク設定ガイド
Livox MID-360複数台のネットワーク構成とROS2設定方法を紹介し、信頼性の高い運用をサポートします。

ROS2で使う3D-LiDAR MID-360内蔵IMU使い方
MID-360内蔵IMU搭載の3D-LiDARは高精度自己位置推定やSLAMに活用されるセンサー技術です。