Mid-360Sを使ってみたいと思っても、「まず何を準備すればいいのか」「点群が表示されるまで、どこまで設定が必要なのか」と悩む方は少なくありません。
Mid-360Sは、Livoxの小型3D LiDAR「MID‑360」の後継機として、2026年4月にリリースされた最新モデルです。
本コラムでは、Mid-360Sが届いてから、Livox Viewer、さらにROS 2(RViz)上で点群を確認できるようになるまでの流れを、初めての方にも分かりやすくまとめています。
これからMid-360Sの導入を検討している方や、MID‑360からの置き換えを考えている方に向けたスタートガイドとして、ぜひ参考にしてください。
1. Mid-360Sとは
Mid-360Sは、Livoxの小型3D LiDAR「MID‑360」の後継機として、2026年4月にリリースされた最新モデルです。
従来モデルで高く評価されてきた広い視野や取り扱いのしやすさをベースにしつつ、外観やコネクター仕様などに違いが見られます。具体的には、外観(Livoxロゴの有無)やコネクター部の位置が調整され、あわせて新しいSDKやViewerへの対応が進められています。そのため、MID‑360を使った経験がある方であれば、基本的な考え方はそのままに、スムーズに移行できます。一方で、初めてLivox製LiDARを使う方にとっても、扱いやすい構成となっています。ただし、Mid-360Sは高性能なセンサーである一方、電源の取り方やケーブルの準備、PC側のIP設定など、初期構成でつまずきやすいポイントがいくつかあります。
そこで本コラムでは、Mid-360Sを手にした直後から点群が画面に表示されるところまでをゴールとして、必要な準備と作業を順番に解説していきます。
さらにMid-360Sは、同クラスの3D LiDARと比較して導入しやすい価格帯であるだけでなく、従来モデルである MID‑360よりも価格が抑えられた後継機です。MID‑ 360で評価されてきた特長を引き継いだ後継機として、初期導入時のコストを抑えたい場合にも選びやすいモデルです。
当社はLivox製品の正規代理店としてメーカーと直接取引を行っているため、定価よりお求めやすい価格条件と技術サポートを提供できる体制を整えています。購入前の相談から対応しているため、初めてLiDARを扱う方でも安心してご利用いただけます。
2. Mid-360Sが届いたらまず確認したいポイント(付属品・ケーブル)
開封直後のチェックを怠ると、後で原因不明のトラブルに悩まされやすくなります。最初に付属品と状態を確認しておくと安心です。
2-1. Mid-360Sの梱包内容と付属品一覧

Mid-360Sの同梱内容一覧。本体に加えて、3線式航空コネクターや電源アダプタは別途必要になります。
同梱内容は以下の通りです。
- Mid-360S本体
- Product Information(製品仕様や注意事項が記載された資料)
- 六角レンチ
- ねじ(M3) × 8本
- クリーニングクロス
- 除湿剤
※ Livox 3線式航空コネクター、電源アダプタは付属していません。
もし付属品の不足や破損が疑われる場合は、当社からご購入済みのお客様に限り、交換や確認のご相談を承っています。
2-2. Mid-360Sの電源仕様と必要なケーブル(3線式航空コネクター)
Mid-360Sを動作させるためには、以下の準備が必要です。
- Livox 3線式航空コネクター(1.5m)
- 9〜27V の電源
電源は本体に直接接続するのではなく、Livox 3線式航空コネクターを介して供給します。
Livox 3線式航空コネクターは、Mid-360Sの電源供給や通信確認に広く使われているアクセサリーです。
一方が M12 航空コネクター(メス)、
もう一方が
- 電源線
- イーサネット線
- 機能線
の3系統に分かれた構成になっています。
電源部分は配線がむき出しの状態になるため、当社では DC ジャック(配線ねじ止めタイプ) を使用して、電源アダプタと接続しています。使用しているDCジャックはKM-DN291(URL)
です。

MID‑360/360Sの電源・通信に使用するLivox 3線式航空コネクター

電源線・DC ジャック
3. Mid-360SのPC接続と初回動作確認手順
3-1. 電源とLANを接続する手順
順番どおりにつなぐと安定します。
1. Livox 3線式航空コネクターを Mid-360S へ接続
2. 電源アダプタの出力側を Livox 3線式航空コネクターの電源線に接続
3. LANケーブルを PC へ接続
4. 電源アダプタの入力側を電源につなぐ
→ 小さな駆動音・振動していれば起動しています

接続イメージ
3-2. Mid-360SのIP設定(Ethernetの固定IP設定)
Livox製品の初期IPアドレスは 「192.168.1.1XX」(XXはシリアルナンバー下2桁)となります。シリアルナンバーはLiDAR本体と個装箱に記載してあります。
例:添付写真のケースでは 192.168.1.182 となります。

シリアルコード
PC側のIPも同じネットワーク帯に合わせます。例:PCを「192.168.1.50/255.255.255.0」に設定
詳しくは別のコラムに書いておりますので、ご参照ください。(こちら)
4. Livox Viewerで点群を見るまでの流れ
4-1. Viewerのインストール
Livox公式ページには最新のLivox Viewer 2が公開されています。Mid-360S は 旧Viewer(2.3.0など)では認識されませんので、必ずver.2.4.2 以降をご使用ください。(ダウンロード先)
4-2. デバイス認識の確認
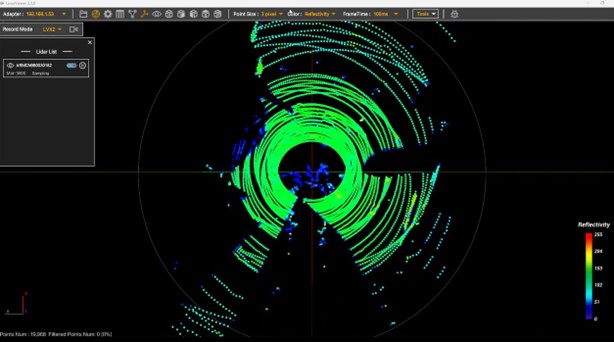
Viewerを開くと左側に接続センサーの一覧が表示されます。
「Mid-360S」の名前とシリアル番号が見えたら、通信は正常です。
Livox Viewer 2の使い方については別のコラムに書いておりますので、ご参照ください。(こちら)
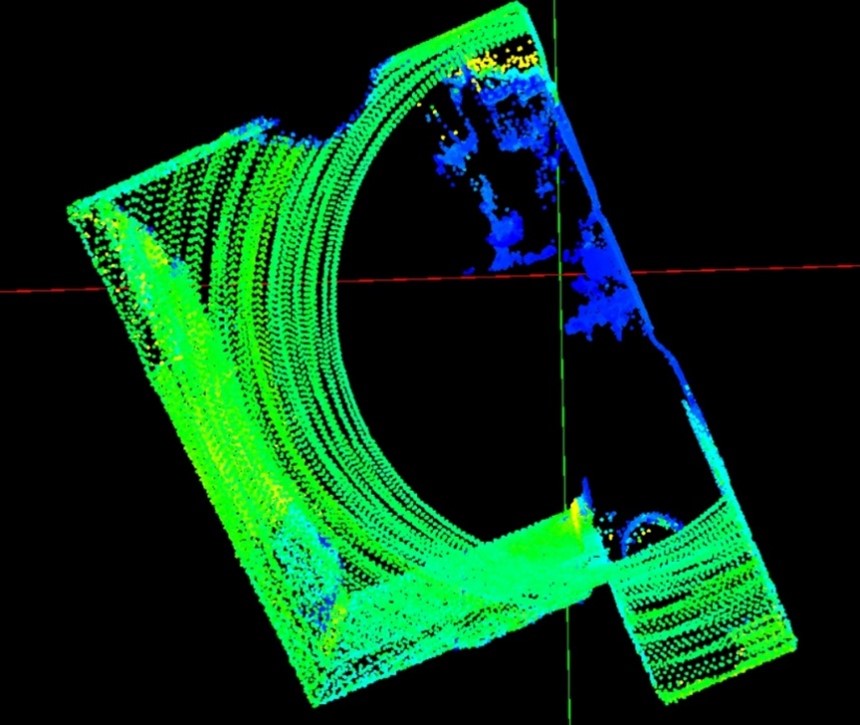
Livox Viewer 2.4.2以降でMid-360Sの点群が表示された状態。ここまで確認できれば基本動作は問題ありません。
4-3. 点群が表示されない場合の対処
点群が表示されない原因の多くは、初期設定や通信まわりにあります。
- IPアドレスの設定が正しくない
- ケーブルの接続不良
- Livox Viewer のバージョンが古い(ver. 2.3.0以前)
- PCのファイアウォールやセキュリティソフトにより通信がブロックされている
電源が弱いと再起動を繰り返すこともあり、点群が途切れる原因になります。また、ファイアウォールやセキュリティソフトが有効な環境では、LiDAR からの通信が遮断され、Viewer 上でデバイスが認識されない場合があります。Ping は通るものの点群が表示されないといった場合は、ファイアウォールの設定を確認し、Livox Viewer の通信が許可されているかを確認してください。
5. ROS 2(RViz)でMid-360Sの点群を表示するまでの流れ
Mid-360Sは、Livox Viewerだけでなく、ROS 2 環境でも点群を扱えます。
ロボット開発や自律移動を目的とする場合、RViz 上で点群を確認できるかどうかは重要なチェックポイントです。
ここでは、ROS 2 を使って RViz に Mid-360S の点群を表示するまでの流れを、概要レベルで説明します。
細かいカスタマイズや応用は省略し、まずは「表示できた」という状態をゴールにします。
5-1. 事前に準備するもの
ROS 2 で Mid-360S を使うために、以下の環境が必要です。
- Ubuntu(ROS 2 対応版)
- ROS 2(Jazzy, Humble など)
- Livox SDK2(ver. 1.3.1以降)
- Livox ROS Driver 2(ver. 1.2.6以降)
Mid-360S は 旧SDK(ver. 1.2.5以前)では認識されないため、 ROS 2で使用する場合は最新のSDK2 を使うことが前提となります。ROS 2 の環境構築やドライバの導入に不安がある場合は、環境確認や構成の相談を承っています。
5-2. Livox ROS Driver 2 の設定ポイント
Livox ROS Driver 2 では、設定ファイル(livox ros driver2/config/MID360s_config.json)で接続する LiDAR を指定します。
Mid-360S
を使用する場合、IP アドレスの設定が重要です。
設定ファイルでは、
- Mid-360S 本体の IP アドレスを指定
- PCのIPアドレス指定
をする必要があります。
この設定が正しくない場合、
- ドライバは起動するが点群が出ない
- RViz に何も表示されない
といった状態になります。
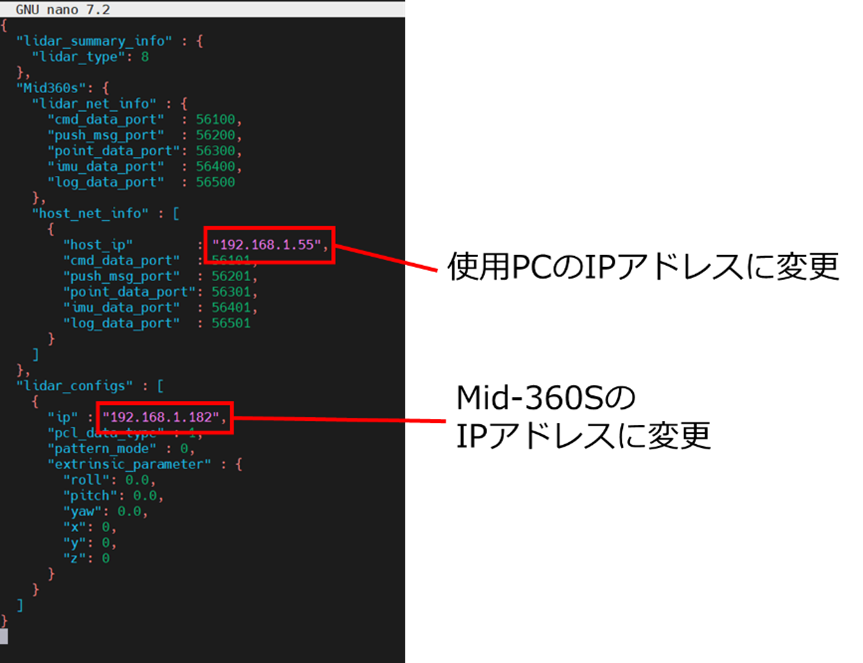
設定ファイル修正箇所
5-3. ROS 2 ノードを起動する
設定が完了したら、以下のコマンドでLivox ROS Driver 2 を起動します。
ros2 launch livox_ros_driver2 rviz_MID360s_launch.py
このコマンドを実行すると、Livox ROS Driver 2 が起動すると同時に RViz も自動で起動し、Mid-360S からの点群データが ROS 2 のトピックとして配信・表示されます。
正常に起動した場合、
- RViz が自動で立ち上がる
- 360S の点群がすでに画面上に表示されている
という状態になります。
この状態であれば、ROS 2 と Mid-360S の接続は問題なく完了しています。
初めて表示したときは、
- 点が小さく見える
- 色の違いが分かりにくい
と感じる場合がありますが、これらは RViz 側の表示設定(点サイズや色設定)を調整することで見やすくできます。
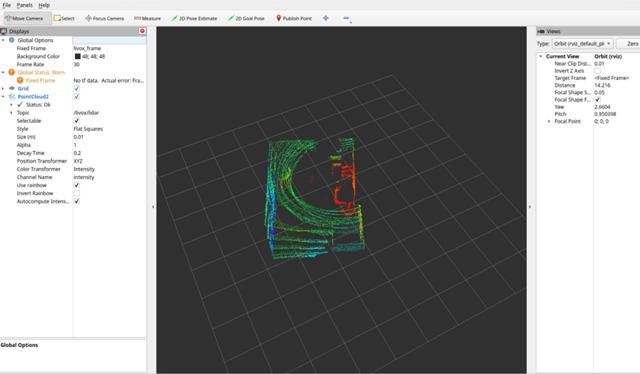
ROS 2(RViz)上でMid-360Sの点群を表示した例
5-4. 点群が表示されない場合の確認ポイント
RViz に点群が表示されない場合、多くは以下のいずれかが原因です。
- Livox ROS Driver 2 が正常に起動していない
- 設定ファイルのデバイス名や IP アドレスが異なっている
- 最新のSDKを使用していない
- RViz の Fixed Frame が適切に設定されていない
- 表示する点群トピックの指定ミス
Mid-360S 本体の故障であるケースは少なく、設定まわりを見直すことで解決することがほとんどです。
当社から Mid-360S をご購入いただいたお客様については、「どこまで動作しているか」を一緒に確認しながら、RViz 上で点群が表示されるまでの切り分けをサポートしています。
まとめ
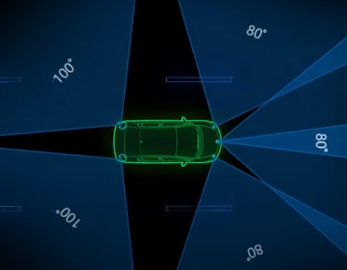
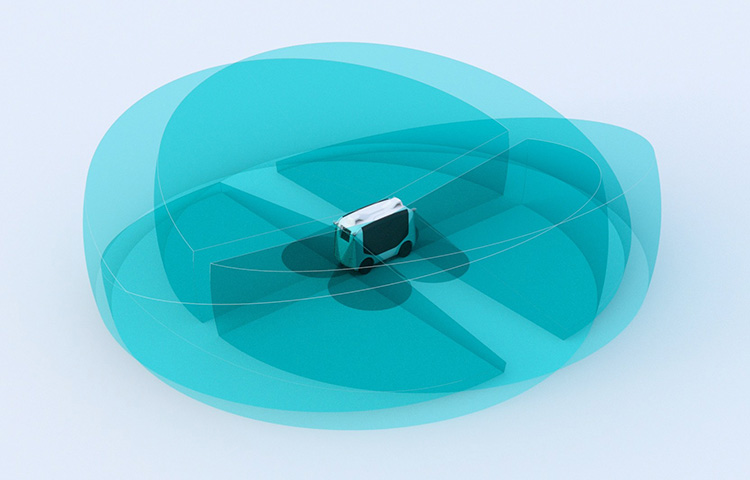
Mid-360Sは、360°の広い視野と軽量性を備えた小型3D LiDARで、ロボットやUAV、屋内外計測など幅広い用途に活用できるモデルです。
本コラムで紹介したように、開封後の確認から電源接続、IP設定、Livox Viewer 2(※Mid-360Sは最新版の Viewer 2.4.2 以降が必須)での認識確認までを順に進めれば、点群表示まで迷わず到達できます。
また、Mid-360Sは Livox Viewer 2だけでなく、ROS 2 環境でも利用できます。
Livox ROS Driver 2 を使うことで、RViz 上で点群を確認でき、SLAM や自律移動といったロボット開発への展開も見据えた導入が可能です。
まずは Viewer で基本動作を確認し、その後 ROS 2 に進むという段階的な進め方もしやすくなっています。
Mid-360Sの導入にあたって、 「自分の環境で動作するか不安」 「どこまで準備すればよいか分からない」 と感じる場合は、当社から Mid-360S の購入を検討されているお客様を対象に、事前相談を承っています。
すでに当社からご購入いただいているお客様には、セットアップや初期動作確認のサポートも行っています。
Mid-360Sの導入をスムーズに進めたい方は、ぜひお気軽にお問い合わせください。導入前の構成確認や、用途に合わせた使い方についてもご相談いただけます。
免責事項
※本コラムは、2026年4月時点の情報をもとに作成しています。
今後の製品仕様やソフトウェアのアップデートにより、内容が変更される可能性がありますので、あらかじめご了承ください。