近年、「Imaging Radar」は自動運転、ロボティクス、産業安全分野で急速に注目を集めています。従来のRadarは対象の有無のみを検出するものでしたが、Imaging Radarは対象物の形状や分布を点群(ポイントクラウド)として高精度に視覚化できる次世代技術です。CameraやLiDARに匹敵する認識能力を持ちながら、Radar特有の耐候性や速度推定機能も兼ね備えています。本記事では、Imaging Radarがなぜ今注目されているのか、点群生成の仕組み、そして現状の技術的課題について解説します。
視覚化されるセンサー技術の世界:Imaging Radarの位置づけ
自動運転、ロボティクス、スマートインフラなどの分野では、環境情報を高精度に「視覚化」するセンサー技術が不可欠です。現在、Camera・LiDAR・Radarの三種類のセンサーが、それぞれ異なる物理原理と波長帯を活用して環境認識を担っています。各センサーの特徴と限界を把握することで、Imaging Radarの技術的優位性が明確になります。
従来の三本柱の特徴と波長の違い
-
特徴: 色や質感を捉える能力に優れ、物体認識や分類に強みがあります。
-
限界:霧・暗所・逆光などの環境下では性能が大きく低下します。
-
波長的背景:可視光は非常に短い波長で、空気中の微粒子(霧・煙・雨粒)による散乱の影響を受けやすく、視界が遮られやすい特徴があります。
-
特徴: 高精度な3D点群を生成でき、物体の形状を詳細に把握可能です。
-
限界:雨・雪・霧などの悪天候で性能が低下し、コストも高めです。
-
波長的背景:赤外線は可視光よりも長い波長を持ち、ある程度の透過性はあるものの、水分や粒子による吸収・散乱の影響を受けやすい特徴があります。
-
特徴: 距離と速度の検出に強く、悪天候にも耐性があります。
-
限界:角度分解能が低く、得られる情報は「点」レベルで、画像としての認識は困難でした。
-
波長的背景:ミリ波/マイクロ波は霧・雨・雪などの粒子を透過しやすく、全天候型のセンサーとして優れています。ただし、波長が長いために空間分解能が低くなりがちです。
ここに登場したのがImaging Radar
Imaging Radarは、従来レーダーの強みを活かしつつ、空間分解能を高めて画像化を可能にする次世代技術です。
-
Radarの耐候性+速度推定能力
雨や霧などの環境下でも安定した性能を発揮し、対象物の速度も同時に推定可能。 -
MIMO(多入力多出力)アレイアンテナと広帯域技術
複数アンテナを用いたMIMO構成と広帯域信号により、角度・高さ方向の分解能を大幅に向上。 -
点群として出力
物体の形状をある程度把握できる3D点群を生成し、AIによる認識や分類に活用可能。
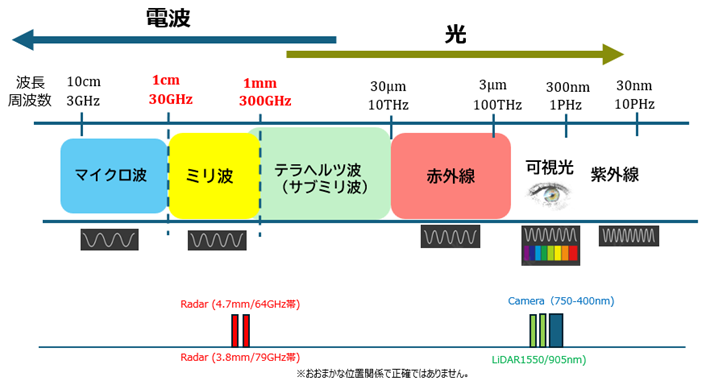
波長から見たセンサーの補完関係
| センサー | 波長帯 | 強み | 弱み |
|---|---|---|---|
| Camera | 可視光(400–750nm) | 色・質感・分類 | 天候・暗所に弱い |
| LiDAR | 赤外線(905nm/1550nm) | 高精度3D形状 | 雨・霧・コスト |
| Radar | ミリ波/マイクロ波(3.9–12.5 mm) | 距離・速度・耐候性 | 分解能・画像化困難 |
| Imaging Radar | 耐候性+画像化 | 解像度はLiDARに劣る場合も |
このように、波長の違いがセンサーの得意・不得意を決定づけており、イメージングレーダーはそのギャップを埋める存在として注目されています。環境認識の精度と信頼性を高めるためには、これらのセンサーを相補的に組み合わせることも重要です。
なぜ今、注目されるのか?
Radar技術自体は古くからさまざまな分野で利用されてきましたが、近年になって民生分野で“Imaging Radar”が特に注目されるようになっています。その背景には、半導体やアンテナ技術、AIによる信号処理などの技術的進化に加え、自動運転や見守りといった新たな社会的ニーズの高まりがあります。ここでは、こうした注目の理由について簡単に振り返ってみます。
-
1. 半導体技術の進化
ミリ波フロントエンド、A/D変換器、DSP/AIアクセラレータがCMOSで高集積化。これにより、複数送受信素子を搭載した高密度MIMOアーキテクチャが低コスト・小型で実現可能になりました。
-
2. 帯域幅とアンテナアレイの拡張
60GHzから70GHz帯の広帯域化により、距離分解能が向上。アンテナアレイの拡大で角度分解能や高さ分解能が改善し、4Dイメージング(距離・方位角・仰角・速度)が実用レベルに到達しています。
-
3. ソフトウェアとAIの進化
FFTビームフォーミング、CFAR(Constant False Alert Rate)、クラスタリング(DBSCANなど)に加え、レーダーキューブ(Range × Doppler × Angle)にニューラルネットを直接適用する研究・製品が増加。これにより、従来のレーダーよりも高精度な物体認識が可能となっています。
-
4. ユースケースの成熟
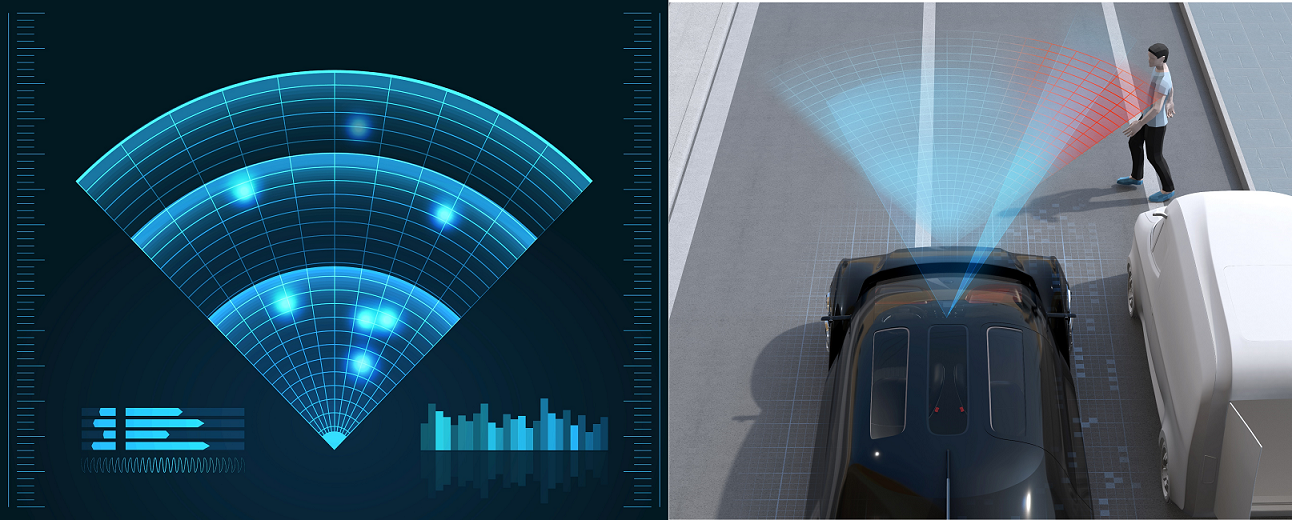
• 自動運転における全天候冗長性要求(雨・霧・暗所対応)
• 車室内での置き去り検知
• 介護現場での見守り工場やインフラの非接触安全監視
• 工場やインフラの非接触安全監視
• ドローンの視界不良時のナビゲーション
これらの用途で、Imaging Radar “見えるレーダー”(画像生成可能なレーダー)の優位性が明確化しています。
点群はどうやって作られるのか?
次にこのImaging Radar技術の核である点群の生成についてみていきたいと思います。Imaging Radarが「目に見える形」で空間を描くためには、電波の反射情報を**物理的な座標データ(点群)**に変換する必要があります。これは、単なる距離測定ではなく、空間の中に点を打つという高度な処理です。以下にその流れを解説します。
1. 電波の送信と反射の取得
-
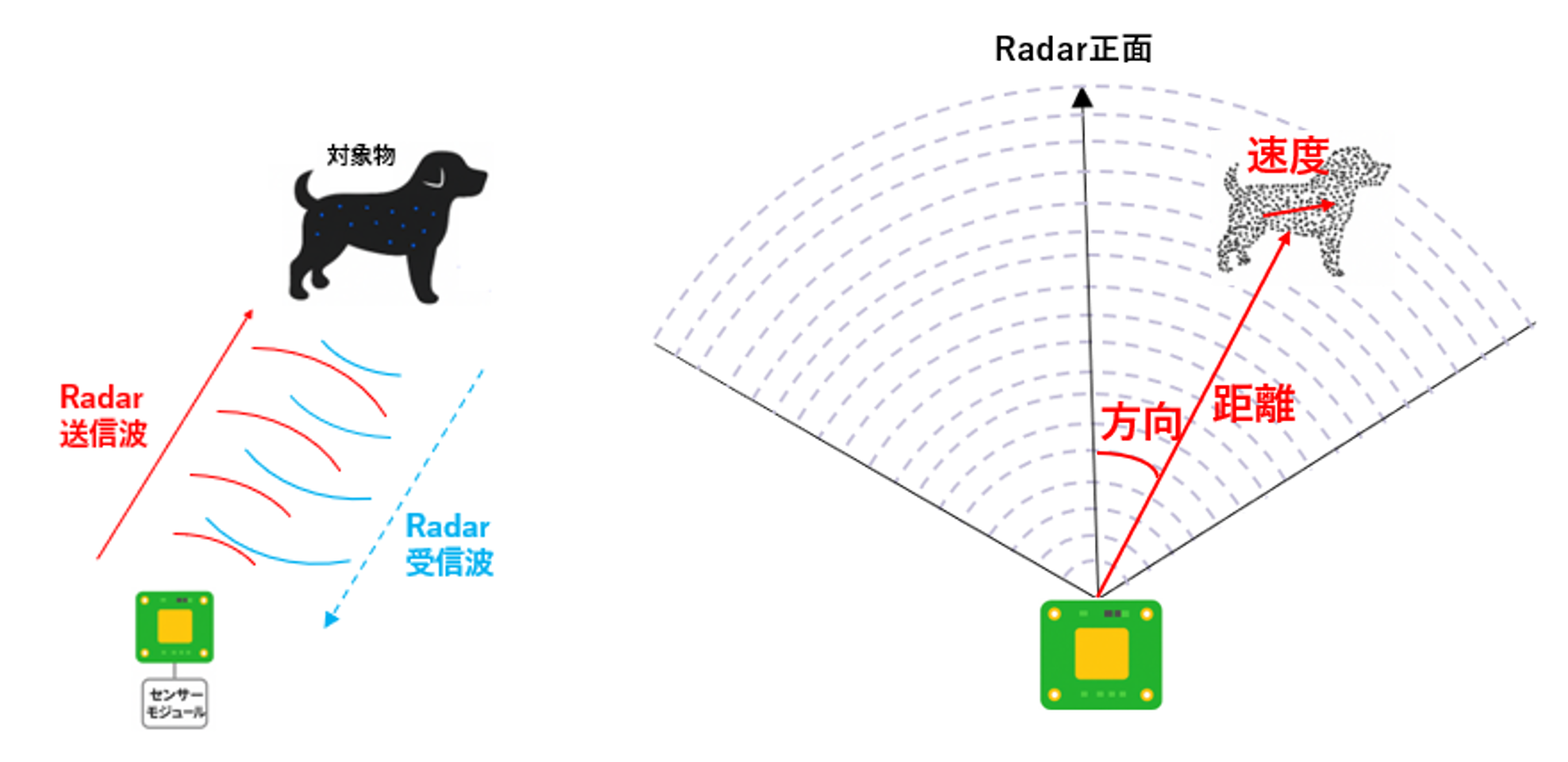
まず、Imaging Radarはミリ波帯の電波を空間に向けて送信します。対象物に当たった電波は反射し、Radarの受信アンテナに戻ってきます。このとき取得できる情報は以下の通りです:
• 距離(Range):送信から受信までの時間差から算出
• 速度(Velocity):受信電波のドップラーシフトを計測して算出
• 方向(Angle):複数アンテナでの受信位相差から算出
• 反射強度(Intensive):対象物の材質や形状に依存
2. MIMOとビームフォーミングによる空間分解
-
Imaging Radarでは、MIMO(Multiple Input Multiple Output)構成が重要な役割を果たします。複数の送信・受信アンテナを組み合わせることで、仮想的に多数の視点を持つことができ、空間分解能が向上します。
さらに、ビームフォーミング技術を使うことで、特定の方向に電波を集中させたり、反射波の到来方向を高精度に推定することが可能になります。これにより、対象物の「どこにあるか」をより細かく把握できます。
3. 距離・方向・速度・強度から点群を生成
-
取得した距離と方向の情報をもとに、**極座標(距離・角度)→直交座標(X, Y, Z)**へ変換を行います。これにより、空間内の点として表現できるようになります。
X = R × cos(θ) × cos(φ)
Y = R × sin(θ) × cos(φ)
Z = R × sin(φ)
ここで、
R:距離
θ:水平角
φ:垂直角例えば、ある反射点が「距離5m、水平角30度、垂直角10度」にあるとすると、以下のような座標変換が行われます:
このようにして得られた多数の点が、**点群(ポイントクラウド)**として構成されます。各点には、反射強度などの属性も付加され、空間の中に点を打ち、 物体の材質や輪郭を推定する手がかりになります。
4. 点群の可視化と後処理
-
点群はそのままではノイズが多く、意味のある形状として認識しづらい場合があります。そのため、以下のような後処理が行われます:
• ノイズ除去:反射強度が低い点や孤立点を除去
• クラスタリング:近接する点をグループ化し、物体として認識
• トラッキング:時間的に連続する点群を追跡し、動きのある物体を検出
これらの処理を経て、最終的に人間が理解できる形で3D表示されたり、AIによる物体認識に利用されたりします。
実際のImaging Radarの点群精度ってどのくらい?
ここまでで、Imaging RadarがどのようにしてRadar信号から点群(ポイントクラウド)を生成し、空間を可視化しているかを簡単に見てきました。では、実際に得られる点群の「精度」はどの程度なのでしょうか?
多くの方が気になるこの点について、ここではよく比較対象となるLiDARとImaging Radarの点群精度を中心に、その違いや特徴を具体的な数値とともに紹介します。
実際のImaging Radarの点群精度
-
距離分解能:
高性能Imaging Radarでは 数cm〜10cm未満 程度。
(LiDARは2cm程度なのでRadarはやや劣る) -
角度分解能:
水平方向:1°~2°(高密度アレイで0.5°程度)
垂直方向:2°~5°(垂直方向は粗い) -
点群密度:
LiDARの数十万点/秒に対し、Radarは数千~数万点/秒程度。
→ Radarは「粗いが全天候対応」という特徴。 -
特徴:
・雨・霧・雪に強い
・材質による反射差が大きい(非金属は弱い)
・点群は「スパース(疎)」で、物体の輪郭は粗いが位置認識は可能。
LiDARとの比較(参考)
| 項目 | Imaging Radar (70GHz帯) | LiDAR (関連情報 #1) |
|---|---|---|
| 距離精度 | 数cm〜10cm | 約2cm |
| 角度分解能 | 1°~5° | 0.1° |
| 点群密度 | 数千~数万点 | 数十万点 |
| 天候耐性 | ◎(雨・霧・暗所でも安定) | △(雨・霧で性能低下) |
現状と課題
本コラムでは、Imaging Radarの特徴について、CameraやLiDAR、従来Radarとの比較を交えながら解説してきました。Imaging
Radarは決して万能な技術ではなく、現時点ではまだ多くの課題やハードルが残されています。また、近年では各センサーの強みを組み合わせて活用する「センサーフュージョン」の流れも加速しています。
最後に、Imaging Radarの現状と今後解決すべき課題について、改めて整理してみたいと思います。
【現状:技術的進展】
-
1. 高分解能化の実現
MIMO構成と広帯域信号により、従来レーダーよりも高い空間分解能を達成。
3D点群として物体の形状をある程度把握可能。 -
2. 全天候対応性能
雨・霧・雪などの悪天候下でも安定した検出能力。
可視光や赤外線に比べて波長が長く、環境耐性に優れる。 -
3. 速度推定能力
ドップラー効果を活用し、対象物の移動速度を高精度に推定可能。
-
4. AIとの連携
点群データをAIで解析・分類することで、物体認識の精度が向上。
センサー融合によるマルチモーダル認識が進展。
【課題:技術的・運用的な障壁】
-
1. 解像度の限界
距離分解能は広帯域化で改善可能だが、角度分解能はアンテナ口径に依存する。
車載用途などではスペース制約が大きく、アンテナサイズに限界がある。 -
2. マルチパスとゴースト
壁や車体などによる反射で**偽検出(ゴースト)**が発生する可能性がある。
AIによるクラッタ除去やマルチパス補正技術が研究中。 -
3. 干渉問題
複数レーダーが同時稼働する環境では相互干渉が発生する可能性がある。
チャープランダム化や周波数分離などの対策が進行中。 -
4. 計算負荷の高さ
4Dイメージング(距離・角度・高さ・速度)では、FFTやDOA推定など演算量が膨大。
エッジAIや専用DSPの導入が不可欠。 -
5. コストとサイズの課題
高性能なアンテナや広帯域回路の実装により、コストや筐体サイズが増加。
車載・ドローンなどの用途では、設置スペースや消費電力の制約が厳しい。 -
6. 認識精度のばらつき
物体の材質や形状、周囲環境によって反射特性が異なり、認識精度にばらつきが生じる。
AIによる補正や学習データの充実が求められる。 -
7. 標準化とインフラ整備の遅れ
他センサーとの統合運用に向けた通信プロトコルやデータ形式の標準化が未整備。
開発・評価環境の整備も進行中。
まとめ
Imaging Radarは、耐候性・速度推定という本質的な強みに、MIMO/広帯域/強力な信号処理を組み合わせることで、CameraやLiDARの弱点を補完しながら知覚の冗長性と信頼性を高める技術です。設計・キャリブレーション・干渉・計算量といった課題はあるものの、4DイメージングとAIベースの復元・識別により、点群の密度・意味付けは着実に向上しています。センサーフュージョン時代において、イメージングレーダーは「見えるかどうか」だけでなく「動いているかどうか」「悪条件でも維持できるか」を支える重要な柱になりつつあります。課題はあるものの、半導体・AI・アルゴリズムの進化で、今後さらに高精度化・低コスト化が期待されます。