RF(Radio Frequency:無線周波数)技術は、現代社会の無線通信システムの基盤となる重要な技術です。
本コラムでは、RF技術の中でも近年注目されているミリ波技術にフォーカスして、ミリ波技術の原理、特性について紹介します。
ミリ波技術とは
ミリ波(Millimeter Wave)は、RF(Radio Frequency)技術の中で特に高周波数帯域に位置し、30 GHzから300 GHzの範囲を指します。
この帯域は、電磁スペクトルの中でマイクロ波と赤外線の間に位置していています。電波は、周波数が高いほど取り扱いが難しいという側面がありますが、高い周波数(ミリ波帯域)を利用することで、短い波長が得られ(これにより小型のアンテナ設計が可能)また広い帯域幅を確保することで、高速かつ大容量のデータ伝送が可能になります。
これらが、ミリ波技術が次世代通信技術として注目されて無線通信、レーダー、センサー技術など、さまざまな分野で利用されている理由の一つです。
まず、ミリ波の周波数帯域での位置づけについて説明します。
ミリ波の周波数帯域での位置づけ
- マイクロ波: 1GHz - 30 GHz
- ミリ波: 30 GHz - 300 GHz (波長: 1 mm - 10 mm)
- テラヘルツ波: 300 GHz - 3 THz
- 赤外線:3 THz - 430 THz
- 可視光:430 THz - 750 THz
- 紫外線:750 THz - 3000 THz

ミリ波の種類と周波数帯域での位置づけ
ミリ波技術の原理
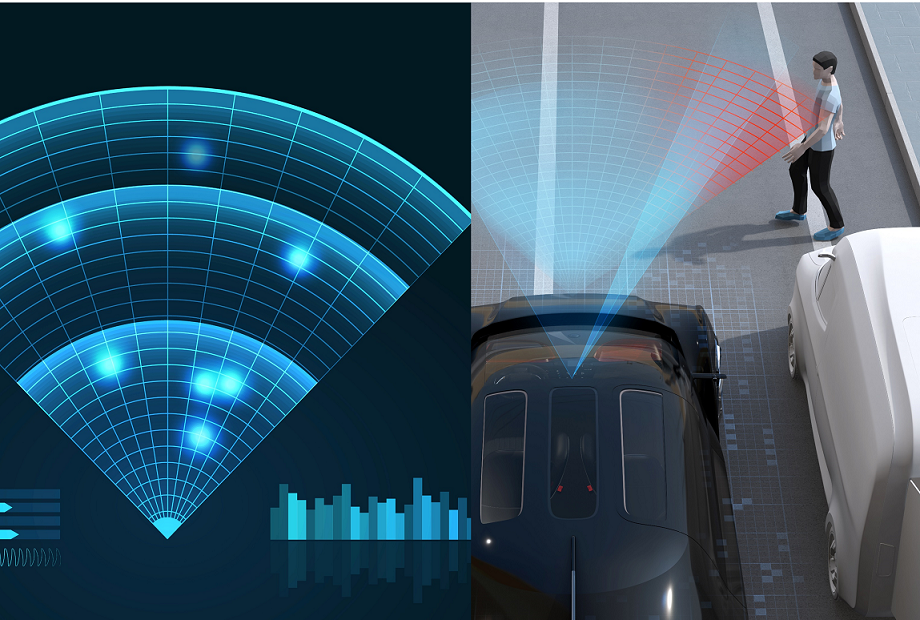
ミリ波技術のセンサーにおける基本的な原理は、ミリ波を対象物に向けて放射し、その反射波を受信することで情報を得るというものです。
送信されたミリ波が物体に当たって反射し、その反射波をセンサーが受信します。この反射波の時間差や周波数の変化を解析することで、物体までの距離や速度、角度、形状などを測定することができます。
ミリ波技術を用いた物体認識
下図は、ミリ波センサーを用いた物体認識の処理イメージです。

ミリ波センサーを用いた物体認識の処理イメージ
-
ステップ1: ミリ波の生成
信号生成: RF信号を生成するために、シンセサイザーという装置が使われます。この装置は特定の周波数で電磁波を生成します。
信号の増幅: 生成された信号はアンプ(増幅器)を通して強化されます。これにより、信号が十分な強度を持つようになります。
-
ステップ2: アンテナからの照射
アンテナへの送信: 増幅されたRF信号はアンテナに送られます。アンテナは電気信号を電磁波(ミリ波)に変換する役割を果たします。
電磁波の放射: アンテナからミリ波が空間に向けて放射されます。このミリ波は直進し、周囲の物体に向かって進みます。
-
ステップ3: 物体との相互作用
物体との接触: ミリ波が物体に到達すると、いくつかのことが起こります。ミリ波は物体に反射されることもあれば、吸収されることもあります。物体の材質や形状によって、これらの割合が変わります。
反射: ミリ波が物体の表面で反射される場合、入射角と反射角は等しくなります。
吸収: 一部のミリ波は物体によって吸収され、熱エネルギーに変わります。
透過:一部のミリ波は物体を透過します。
-
ステップ4: 反射波の戻り
反射波の戻り: 反射されたミリ波は元の方向に戻り、再びアンテナに向かって進みます。
-
ステップ5: アンテナでの受信
アンテナでの受信: 戻ってきたミリ波はアンテナによって再び電気信号に変換されます。 受信された信号は、物体の距離や速度、角度、形状情報を含んでいます。
信号の処理: 受信された電気信号は受信機に送られ、そこで解析されます。これにより、物体の位置や距離、形状などの情報が得られます。
-
ステップ6: データの解析
データ解析: 受信機で得られた信号はデジタル信号処理(DSP)を通じて解析されます。これにより、物体の位置や速度、形状などの情報が抽出されます。解析結果をもとに、物体が何であるかを認識します。AIや機械学習を使って、より正確に物体を特定することもあります。
まとめ
- 1.信号生成: RF信号を生成し、増幅する。
- 2.アンテナからの照射: アンテナが電気信号を電磁波に変換し、空間に放射する。
- 3.物体との相互作用: ミリ波が物体に反射または吸収される。
- 4.反射波の戻り: 反射されたミリ波がアンテナに戻る。
- 5.アンテナでの受信: アンテナが戻ってきたミリ波を電気信号に変換し、受信機に送る。
- 6.データの解析: 受信機で信号を解析し、物体の情報を得る。
このプロセスを通じて、ミリ波を使って物体の位置や形状、速度などを検出することができます。
ミリ波レーダーは、RF信号の反射や吸収を利用して物体を認識します。これにより、周囲の環境を把握することが可能です。ミリ波の特性を理解することで、どのように物体が検出されるかがわかります。
次に、ミリ波技術における代表的なレーダ検出方式について紹介します。
ミリ波技術における代表的なレーダ検出方式

CW方式(連続波方式)
原理: 一定の周波数の電波をずっと出し続け、跳ね返ってくる波を受け取ります。この跳ね返りの周波数の変化から、物体がどれくらいの速さで動いているかを知ることができます。
特性: 速さを測るのに向いていますが、距離はわかりません。シンプルで安価なので、特定の用途に使われます。
2周波CW方式
原理: 2つの異なる周波数の電波を交互に出し、それぞれの跳ね返りを受け取ります。これにより、速さと距離の両方を測ることができます。
特性: 距離と速さを同時に測れますが、距離の精度はFMCW方式ほど高くありません。CW方式より少し複雑です。
パルス方式
原理: 短い電波のパルスを出し、そのパルスが物体に当たって跳ね返ってくるまでの時間を測ります。この時間から距離を計算します。
特性: 距離を測るのに適しており、特に動いている物体を見つけるのが得意です。パルスが短いほど、より細かく距離を測れます。
FMCW方式
原理: 周波数が時間とともに変わる電波を出し、その跳ね返りの周波数の違いを測ります。この違いから、距離と速さを同時に知ることができます。
特性: 非常に高精度で距離を測れ、速さも同時に測れます。システムは複雑ですが、車のレーダーなどで広く使われています。 これらの方式は、それぞれの特性を活かして、用途に応じて選ばれます。例えば、FMCW方式は自動車の安全システムでよく使われ、パルス方式は航空機のレーダーなどで利用されています。
周波数変調連続波(FMCW)について
FMCW方式は、連続波(CW)の周波数を変化(FM)させて一定期間発射し、送信波と反射波の周波数の差から対象物との距離や速度を求める方式です。また、時間とともに周波数が変調する信号をチャープ信号やチャープ波といい、FMCW方式はこのチャープ信号を使用するのが特徴です。
送信波の周波数を時間とともに変化させ、受信波の周波数と比較します。周波数の差から距離を計算します。FMCWは高精度な距離測定が可能です。
FMCWは、距離と速度測定が同時に可能、回路構成が容易、比較的少ない信号処理で高距離分解能を取得可能といった特徴があります。
以下に、代表的なFMCW方式の技術的なプロセスを説明します。

FMCW方式の基本原理
1. 周波数変調
チャープ信号の生成:
FMCWレーダーは、時間とともに周波数が線形に変化するチャープ信号を生成します。
チャープ信号は、電圧制御発振器(VCO)や直接デジタルシンセサイザー(DDS)を使用して生成されます。チャープの帯域幅と持続時間は、レーダーの距離分解能に影響を与えます。広い帯域幅は高い距離分解能を提供します。
2. 送信と受信
送信:
アンテナを通じて、生成されたチャープ信号がターゲットに向けて送信されます。
送信信号は、連続的に周波数が変化するため、ターゲットからの反射を受けた際に時間遅延が生じます。
受信:
ターゲットに反射された信号が、受信アンテナによって受信されます。
受信信号は、送信信号に比べて時間遅延があり、この遅延が距離情報に対応します。
3. ビート信号の生成
ミキシング:
受信信号は、送信信号とミキサーで混合されます。
この混合により、送信信号と受信信号の周波数差に基づく「ビート信号」が生成されます。
ビート周波数:
ビート信号の周波数は、送信信号と受信信号の時間差(遅延)に比例します。
このビート周波数は、ターゲットまでの距離を計算するための基礎となります。
4. 距離の計算
ビート周波数の解析:
ビート信号は、アナログ-デジタル変換器(ADC)でデジタル化されます。
高速フーリエ変換(FFT)を用いて、ビート信号の周波数成分を解析します。
距離の算出:
ターゲットまでの距離 ( R ) を以下の式で計算します。
R = (c * T_c * f_b)/(2 * B)
ここで、
c :光速
T_c :チャープの持続時間
f_b :ビート周波数
B :チャープの帯域幅

5. 速度の計算
ドップラーシフトの解析:
ターゲットが動いている場合、ドップラー効果によりビート信号に追加の周波数シフトが生じます。
このドップラーシフトを解析することで、ターゲットの相対速度を計算します。
速度の算出:
ターゲットの速度 ( v ) を以下の式で計算します。
v = f_d * λ /2
ここで、
f_d:ドップラーシフト
λ:送信信号の波長

6. 角度の計算
アレイアンテナの使用:
角度を検出するために、複数のアンテナ素子を並べたアレイアンテナを使用します。 各アンテナ素子は、ターゲットからの反射信号を個別に受信します。

位相差の利用:
ターゲットからの反射信号は、各アンテナ素子に到達するまでの距離が異なるため、位相差が生じます。
この位相差を解析することで、ターゲットの到来方向(角度)を推定します。
デジタルビームフォーミング(DBF):
デジタルビームフォーミング技術を用いて、特定の方向からの信号を強調し、他の方向からの信号を抑制します。
各種アルゴリズムを使用して、到来方向を高精度で推定します。
これらのプロセスを通じて、FMCWレーダーはターゲットの距離、速度、角度を高精度で測定することができます。これにより、自動運転車や監視システムなど、さまざまなアプリケーションでの利用が可能となります。
ミリ波技術の特性
ミリ波の伝搬特性は、センサーデバイスの設計や応用において重要な役割を果たします。ミリ波センサーは、自動車の衝突回避システム、産業用ロボット、セキュリティシステムなどで広く利用されています。
ミリ波の伝搬特性

反射特性
ミリ波は、特定の物体に当たると跳ね返りやすい性質を持っています。特に、金属や硬い表面にぶつかるとよく反射します。
この特性を利用して、ミリ波センサーは物体までの距離やその物体の動く速さを測定できます。具体的には、ミリ波が物体に当たって跳ね返る時間や反射波の変化を解析することで、物体の位置や動きを非常に正確に追跡できます。
簡単に言えば、ミリ波は「反射を利用して物体の情報を集めるのが得意な電波」であり、それを使って物体の位置や動きを詳しく知ることができるのです。
透過吸収特性
ミリ波の透過性と吸収性は、物体を通り抜けたり、止められたりするかに関する特性です。ミリ波は布やプラスチックのような非金属材料をある程度通り抜けることができ、これを「透過性」と言います。
この特性を利用して、ミリ波センサーは物体の内部を調べることが可能です。例えば、衣服の下に隠れているものを検出するのに使われます。
一方で、水分を含むものや非常に密度の高い材料ははミリ波を吸収しやすく、これを「吸収」と言います。ミリ波が吸収されると電波は先に進めなくなり、結果として届く距離が短くなります。つまり、ミリ波の到達距離に影響を与えるのです。
簡単に言えば、ミリ波は「布やプラスチックを通り抜けることができるが、水や密度の高いものには弱い」という性質を持っています。

電波到達距離が短い
ミリ波は大気や壁による減衰が大きく、電波到達距離がマイクロ波などの波長の長い電波に比べて短いという特長があります。物体に遮られやすく、空気や水に吸収されやすいため、遠くまで飛ばすことが難しいです。
しかし、遠くまで届かないということは、遠距離の電波の混信を受けにくいことを意味します。
そのため、ミリ波は短距離通信には他の電磁波よりも適しているといえます。
直進性がある(ビームフォーミングと指向性)
「ビームフォーミングと指向性」は、ミリ波センサーが信号を送る方法に関する技術です。
「ビームフォーミング」は、ミリ波センサーが電波を特定の方向に集中的に送る技術です。これにより、センサーは特定のエリアを詳しく調べることができます。例えば、特定の場所や物体に焦点を当てて、その部分をしっかりとスキャンできます。
「指向性が高い」とは、電波が特定の方向に強く送られる性質を指します。これにより、周囲の不要な反射を減らし、ミリ波センサーはより正確に物体を検出できます。
簡単に言えば、ビームフォーミングと指向性により、ミリ波センサーは「見たいところをしっかりと見て、余計なものを見ないようにする」ことができ、検出の精度が向上します。

小型化と集積化が可能
ミリ波の短い波長は、センサーデバイスの小型化を可能にします。
「小型化と集積化」とは、ミリ波を使ったセンサーがどれくらい小さく作れるか、そして多くの機能を一つにまとめられるかを指します。ミリ波は波長が短いため、センサーも小型化できます。これにより、多くのアンテナを一つのセンサーに集めて組み込むことが可能です。このように複数のアンテナを配置することを「アレイ」と言います。
アレイを使うことで、センサーはより多くの情報を集められ、感度(細かいものを感じ取る能力)と精度(正確に測る能力)が向上します。
簡単に言えば、ミリ波の短い波長のおかげで、センサーは「小さくても多くの機能を持てる」ようになり、より良い性能を発揮できるということです。

高い分解能を得られる
ミリ波は短い波長を持つため、高い空間分解能を提供します。「高い分解能」というのは、物事を細かく見る能力のことです。
ミリ波というのは、電波の一種で、波長がとても短い特徴があります。波長が短いと、電波が物体の細かい部分まで届きやすくなります。これが「高い空間分解能」を提供するという意味です。
具体的に言うと、ミリ波センサーは、例えば小さな物体やその微細な動き、つまりほんの少しの動きも検出することができます。
これは、ミリ波が持つ短い波長のおかげで、物体の細部までしっかりと捉えることができるからです。
簡単に言えば、ミリ波センサーは「細かいところまでよく見える目」を持っている、ということです。


引用元:Texas instruments [mmWave Radar for Automotive and Industrial Applications]
耐環境性に優れている
ミリ波は空気や水によって減衰しやすく、遠くまで飛ばすのは難しいですが、赤外線や超音波に比べて直進性が高く、比較的悪環境下でも使用可能でき短距離での運用に適しています。また光を使わないため、夜間や逆光でも検出が可能です。
ミリ波信号の扱いで考慮すべき特性
ミリ波は高周波の電磁波であり、信号を扱う際には以下の特性を考慮する必要があります。また、対象物の形状、厚さ、表面の粗さも重要な要素です。

反射率
ミリ波は、特定の材料に対して高い反射率を示します。
形状: 平滑な表面は反射を強めますが、凹凸があると散乱が増えます。
厚さ: 厚い材料は反射が増加する傾向があります。
表面の粗さ: 表面が粗いと、反射が散乱し、反射率が低下することがあります。
ミリ波を反射する材料例
- 金属: 銅、アルミニウム、鉄などは高い反射率を持ちます。これらの材料は自由電子が多く、電磁波を効果的に反射します。
吸収率
ミリ波は、特定の材料に吸収され、エネルギーが減衰します。
形状: 複雑な形状は内部での多重反射を引き起こし、吸収を増加させることがあります。
厚さ: 厚い材料は吸収が増加し、透過が減少します。
表面の粗さ: 表面が粗いと、吸収が増加することがあります。
ミリ波が吸収される材料例
- 水や湿気のある物質: 水はミリ波を吸収しやすく、湿気のある材料も同様です。
- 誘電体材料: ゴムや特定のプラスチックなどの誘電体は、ミリ波を吸収する特性があります。
透過率
ミリ波は、特定の材料を透過することができます。
形状: 平滑な形状は透過を促進しますが、複雑な形状は散乱を引き起こすことがあります。
厚さ: 薄い材料は透過率が高く、厚い材料は透過率が低くなります。
表面の粗さ: 表面が滑らかであるほど透過が容易になります。
ミリ波を透過する材料例
- ガラス: 一般的なガラスはミリ波をある程度透過しますが、厚さや組成によって透過率が異なります。
- プラスチック: ポリプロピレンやポリエチレンなどはミリ波を透過しやすいです。
- セラミックス: 一部のセラミック材料はミリ波を透過します。
これらの特性は、ミリ波センサー技術において重要であり、材料の選択や設計において考慮されます。
材料の特性は、使用するミリ波の周波数や環境条件によっても変化するため、具体的な用途に応じた十分な検討が必要です。
まとめ
ミリ波技術は、その高い周波数帯域と特性によって、さまざまな分野での応用が期待されています。特に、通信速度の向上や高精度なレーダーシステムの開発において、その可能性は無限大です。
しかし、技術の進化には常に課題が伴います。ミリ波の特性を最大限に活用するためには、さらなる研究と革新が必要です。
今後もこの分野での進展が続くことを期待しつつ、私たちの生活や産業にどのように貢献していくのか、必見です。
ミリ波技術当社取り扱いメーカー
ネクスティ エレクトロニクスでは、下記のメーカーのミリ波関連製品を取り扱っています。
これらのメーカーと共に、私たちはお客様に最先端のミリ波技術を提供し、さまざまなニーズに応えてまいります。
メーカーや製品に関して気になることがあれば、ぜひお問い合わせください。
-
インフィニオン テクノロジーズ
24GHz/60GHz/77GHz/79GHz
半導体ソリューションのリーダーで、高性能なミリ波センサーを提供しています。 -
Acconeer
60GHz/Pulsed Coherent Radar
小型で低消費電力のミリ波センサーを開発し、IoTデバイスへの応用が進んでいます。 -
アナログ・デバイセズ
24GHz
高度なアナログ技術を駆使し、精密なミリ波ソリューションを提供しています。 Smart Radar System
高精度なレーダー技術を持ち、産業用から消費者向けまで幅広い用途に対応しています。Vayyar Imaging
60GHz/79GHz
4Dイメージング技術を活用し、医療、スマートホーム、車載市場に革新をもたらしています。
お問い合わせ
関連技術コラム
関連製品情報

Lantronix - Qualcomm IoT Application Processors搭載 System on Module
Lantronixは、Qualcomm IoTプロセッサを搭載したSoMを提供し、AIや5Gを活用したエンドツーエンドソリューションを提供しています。
- LANTRONIX, INC.
- ICT・インダストリアル
- スマートファクトリー・ロボティクス

USB ソリューション(EZ-USB™ / EZ-PD™)USB 2.0からUSB 3.2、USB-C Power Deliveryまで、InfineonのUSB製品は高速データ転送と高効率充電をワンストップで実現。
インフィニオンのUSBソリューションは、EZ-USB™とEZ-PD™で高速データ転送と高効率USB-C充電を車載や産業用途で実現しています。
- Infineon Technologies AG
- NEXT Mobility
- ICT・インダストリアル

コネクテッドインテリジェントエッジ(Connected Intelligent Edge)を実現する Qualcomm IoT Application Processors
QualcommのIoT Application Processorsは、AIや5Gを活用し、ロボティクスやスマートカメラなどの多様なIoTソリューションを提供します。
- Qualcomm Technologies, Inc.
- NEXT Mobility
- ICT・インダストリアル
- スマートファクトリー・ロボティクス

NXPの車載CAN/LINトランシーバー製品の特徴を徹底解説
車載ネットワーク製品をお探しのECU開発メーカー様向けに、車載環境の厳しい条件に耐えることのできる、NXPの車載CAN/LINトランシーバー製品の特徴について解説します。
- NXP Semiconductors N.V.
- NEXT Mobility
- ICT・インダストリアル
NXPの信号改善機能(SIC)を搭載したCANトランシーバー製品の解説
NXPのSIC搭載CANトランシーバーは送信側でリンギングを能動的に抑え、CANFDの高速通信を安定化し、ソフト互換やピン互換で既存設計に置換可能、車載規格に準拠します。
- NXP Semiconductors N.V.
- NEXT Mobility

NXPの車載ミリ波レーダー製品の紹介
先進運転支援システム(ADAS)において重要なセンサー車載ミリ波レーダーの概要と、その市場をリードするNXPの先進的なレーダー製品ファミリーをご紹介します。
- NXP Semiconductors N.V.
- NEXT Mobility
- ICT・インダストリアル
- スマートファクトリー・ロボティクス