はじめに
こんにちは!
ネクスティエレクトロニクス開発部員です。
普段の業務では各種エッジAIデバイスの技術サポートを担当しています。
このコラムではRadxa社のシングルボードコンピュータROCK 5 Model BでエッジAIアクセラレータHailo-8を動作させる例をご紹介します。
OSのダウンロード時間を除けば、1時間かからずに試すことができます。ぜひチャレンジしてみてください。
Hailo-8はRaspberry PiのAI HAT+にも搭載されているAIアクセラレータです。
最大26 TOPSと高い演算性能がありさまざまな画像系のAIモデルを動作させることができます。
ベースボードとして利用するROCK 5 Model BはRaspberry Pi 5と同じCortex-A76コアを4つ搭載しています。
またM.2コネクタ(M-Key)が標準で搭載されているためSSDやHailo-8 M.2モジュールなどが接続しやすくなっています。
推奨の電源はUSB-C PD 12V/3Aです。
このコラムではROCK 5 Model BとHailo-8を組み合わせて人物姿勢推定のデモを実行する手順を紹介します。
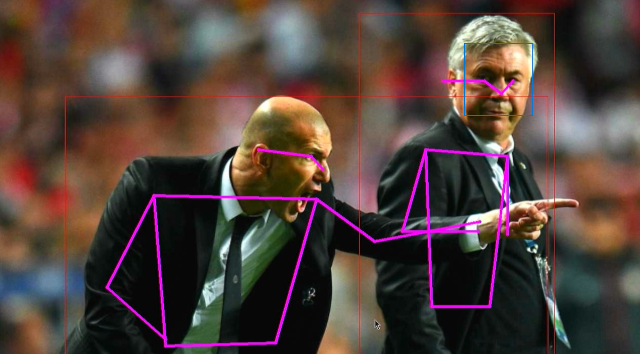
Hailo-8による人物姿勢推定の実行例
製品リンク
ROCK 5 Model Bの準備
Armbianのインストール
この記事ではOSとしてArmbianを利用します。
以下のリンクからROCK 5 Model B用のイメージをダウンロードしてください。
今回のように画像処理の場合はデスクトップ環境をインストールすると良いでしょう。
ただし、GUI環境は必須ではなくHailo-8はヘッドレス環境で問題なく動作します。用途に応じて選択してください。
またArmbianのバージョンによってはカーネルヘッダーの不整合などでPCIeドライバーがインストールできない場合があります。本記事ではArmbian 25.11.1 Noble GNOME Desktopを利用しましたが、ビルドが通らない場合は他のイメージを試してみてください。
ファイルがダウンロードできたら、ホストPCでSDカードに書き込みます。書き込みはWindows、Linuxのどちらでも行うことができます。
今回はホストPCにLinux(Ubuntu)を利用して、以下のコマンドで書き込みました。
もしも、xzが見つからない場合はsudo apt install xz-utilsを実行してインストールします。
# SDカードのドライブを確認。今回は/dev/sdcとして認識された
$ lsblk
...
sdc 8:32 1 28.9G 0 disk
┗━sdc1 8:33 1 28.5G 0 part /media/armbi_root
# 書き込み先をof=/dev/sdcに指定。間違えると書き込み先のデータがすべて消去されるので注意!
$ xz --decompress --stdout Armbian_25.11.1_Rock-5b_noble_vendor_6.1.115_gnome_desktop.img.xz | sudo dd of=/dev/sdc bs=4M status=progress conv=fsync
# SDカードを取り外す前に同期します
$ syncこれ以降の作業はROCK 5 Model Bで行います。
Hailo-8実行環境の準備
ブラウザの起動
1. ROCK 5 Model BにOSを書き込んだSDカードとHailo-8 M.2モジュールを差し込み、ネットワークケーブルを接続します。準備ができたら電源を入れます。
初回の起動時は新しいルートパスワード、ユーザー名などを聞かれるので入力してください。設定が終わるとArmbian LinuxのGUI環境が起動します。
2. 左上のアプリケーションメニューボタン(白い角丸長方形)を押すと、画面下にメニューが表示されます。
右端のShow Applications(白い9つの点のアイコン)を押します。
3. Chromium Web Browserを起動します。
Hailo-8実行環境ファイルのダウンロード
Hailo-8 M.2モジュールを動作させるにはPCIeドライバー、実行環境をインストールする必要があります。
1. Chromium Web Browserのアドレスバーにhttps://hailo.aiを入力しHailo社のサイトへ移動します。未登録の場合は、ユーザー登録を行ってください。
2. ログインするとDeveloper Zoneへアクセスできるようになります。
3. 画面上部のSW Downloadsをクリックします。以下の画像のように選択してください。
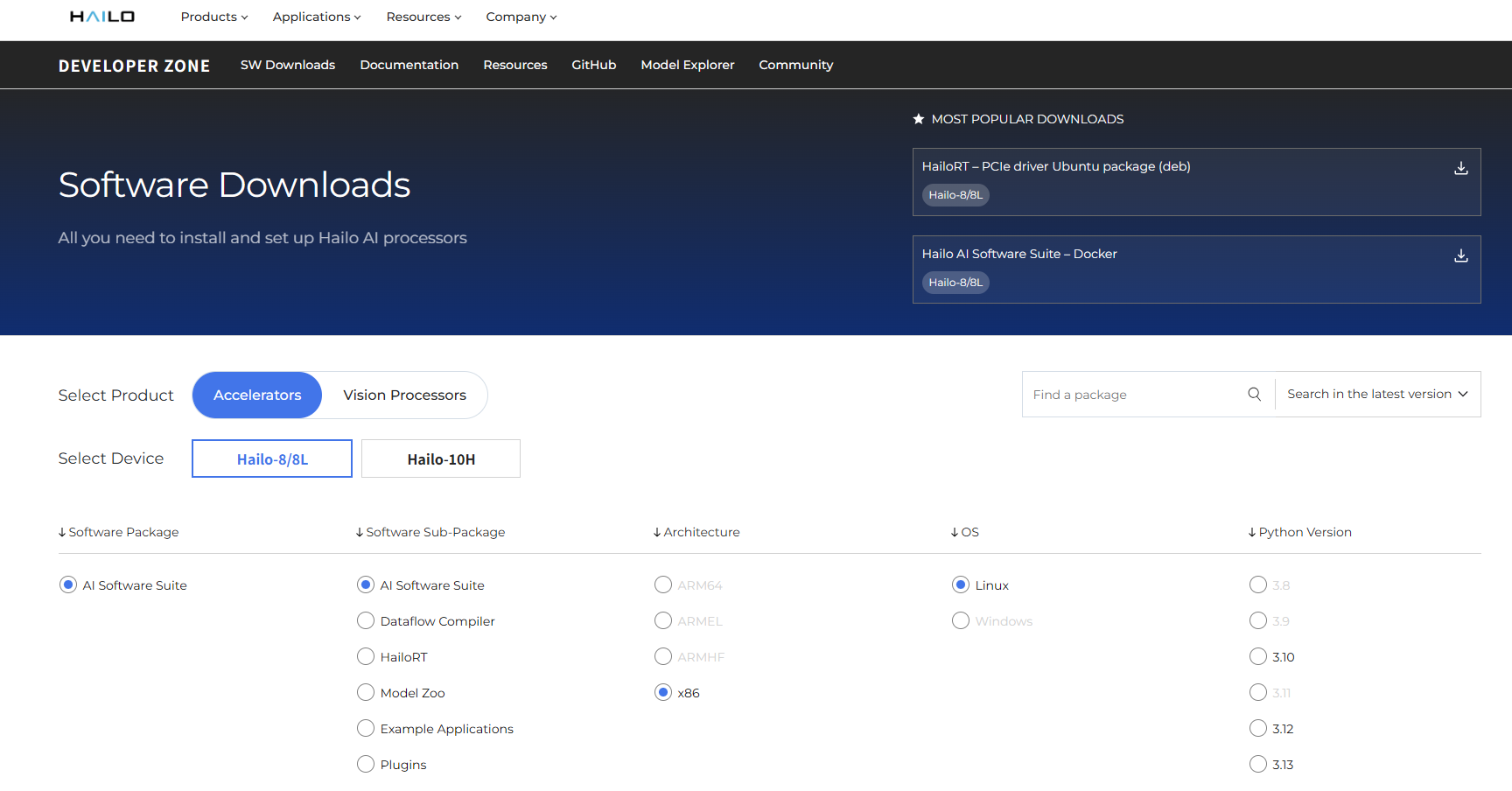
4. リストから次の2つのパッケージをダウンロードします(本記事執筆時点で最新版は4.23.0)
- HailoRT - PCIe driver Ubuntu package (deb)
- HailoRT - Ubuntu package (deb) for arm64
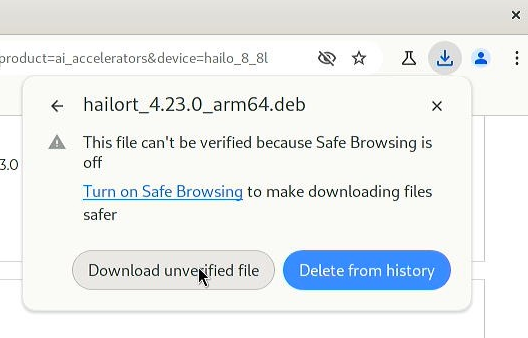
ファイルがダウンロードされない場合は、ブラウザ右上のダウンロードアイコン(下矢印)をクリックします。Recent download historyに"Unverified download blocked"と表示されていたら、その項目をクリックしてダウンロードを許可してください。
5. ターミナルソフトを起動し、ファイルがダウンロードされていることを確認します。
$ cd Downloads
$ ls
hailort-pcie-driver_4.23.0_all.deb hailort_4.23.0_arm64.debHailo-8実行環境のインストール
1. 以下のコマンドを実行してPCIeドライバー、実行環境をインストールします。Do you wish to use DKMS?には、すべて Y を入力します。hailortサービスについても聞かれますが有効にしておくとよいでしょう。
# 依存するツールの導入
$ sudo apt update
$ sudo apt install -y dkms build-essential linux-headers-vendor-rk35xx
# Hailo-8実行環境のインストール
$ sudo dpkg -i hailort-pcie-driver_4.23.0_all.deb
$ sudo dpkg -i hailort_4.23.0_arm64.deb
# 再起動
$ sudo reboot2. OSを再起動したらターミナルを起動し、以下のコマンドを入力します。デバイスが認識されて以下のように表示されれば成功です。
$ hailortcli scan
Hailo Devices:
[-] Device: 0000:01:00.0サンプルコードの実行
ソースコードの取得
1. ターミナルで適当なフォルダへ移動し、以下を実行します。
$ git clone https://github.com/hailo-ai/Hailo-Application-Code-Examples.git
# 本ドキュメント執筆時のバージョンに切り替えます
$ cd Hailo-Application-Code-Examples
$ git checkout 55c64bf2. ソースコードの取得が完了したらHailo-Application-Code-Examples/runtime/hailo-8/cppへ移動します。次のようなサンプルが用意されています。
| アプリケーション | 解説 |
|---|---|
| zero_shot_classification | CLIPによるゼロショット画像分類 |
| classifier | ImageNetによる画像分類 |
| depth_estimation | scdepthv3またはstereonetによる深度推定 |
| onnxruntime | ONNX Runtimeによる推論・後処理 |
| instance_segmentation | YOLOv5、YOLOv8によるインスタンスセグメンテーション |
| object_detection | 物体検出 |
| pose_estimation | YOLOv8による人物姿勢推定 |
| semantic_segmentation | ResNet-18によるセマンティックセグメンテーション |
今回はpose_estimationをビルドしてみます。
ツール・ライブラリのインストール
1. ビルドに必要なツールやライブラリをインストールします
$ sudo apt install -y git cmake g++ make pkg-config libopencv-dev2. ディレクトリを移動して、get_sources.shを実行してHailo-8向けにコンパイルされたYOLOv8モデルをダウンロードします。
$ cd Hailo-Application-Code-Examples/runtime/hailo-8/cpp/pose_estimation/yolov8_pose
$ ./get_sources.shコードの修正
サンプルコードはテンソル演算ライブラリxtensor, xtlに依存しています。最近のバージョンではインクルードパスが異なるため修正が必要です。また、Armbian Linuxにインストールされているgccのバージョンによってはエラーや警告が発生することがあります。適宜、下記のように修正します。
CMakeLists.txt
xtlライブラリのインストール先変更
# 修正前(xtl_DIRのパスからx86_64を削除)
ExternalProject_Add(xtensor-test
GIT_REPOSITORY https://github.com/xtensor-stack/xtensor
CMAKE_ARGS -DCMAKE_INSTALL_PREFIX=${EXTERNAL_INSTALL_LOCATION} -Dxtl_DIR=${BASE_DIR}/build/x86_64/external/share/cmake/xtl/)
# 修正後
ExternalProject_Add(xtensor-test
GIT_REPOSITORY https://github.com/xtensor-stack/xtensor
CMAKE_ARGS -DCMAKE_INSTALL_PREFIX=${EXTERNAL_INSTALL_LOCATION} -Dxtl_DIR=${BASE_DIR}/build/external/share/cmake/xtl/)std::move()に関する警告がエラー扱いされるのを抑制
# 修正前
target_compile_options(${PROJECT_NAME} PRIVATE ${COMPILE_OPTIONS} -fconcepts)
# 修正後
target_compile_options(${PROJECT_NAME} PRIVATE ${COMPILE_OPTIONS} -fconcepts -Wno-error=pessimizing-move)yolov8pose_postprocess.hpp
// 修正前
#include <xtensor/xview.hpp>
#include <xtensor/xsort.hpp>
// 修正後
#include <xtensor/views/xview.hpp>
#include <xtensor/misc/xsort.hpp>
common/math.hpp
// 修正前
#include "xtensor/xarray.hpp"
#include "xtensor/xeval.hpp"
#include "xtensor/xsort.hpp"
#include "xtensor/xview.hpp"
#include "xtensor/xio.hpp"
// 修正後
#include "xtensor/containers/xarray.hpp"
#include "xtensor/core/xeval.hpp"
#include "xtensor/misc/xsort.hpp"
#include "xtensor/views/xview.hpp"
#include "xtensor/io/xio.hpp"common/tensors.hpp
// 修正前
#include "xtensor/xarray.hpp"
// 修正後
#include "xtensor/containers/xarray.hpp"ビルド&実行
1. ビルドします。成功するとbuild/vstream_yolov8pose_example_cppが生成されます。
$ cmake -S. -B build -DCMAKE_BUILD_TYPE=Release
$ cmake --build build
$ ls build2. vstream_yolov8pose_example_cppを実行するとoutput_image.jpgに検出した結果が出力されます。
また、実行時の平均 FPS などが表示されます。
| オプション | 解説 |
|---|---|
| -hef | HEFファイル |
| -input | 入力画像 |
| -num | 繰り返し回数 |
-hefにはget_sources.shでダウンロードしたyolov8s_pose.hefを指定します。
実行例
$ ./build/vstream_yolov8pose_example_cpp -hef=./yolov8s_pose.hef -input=person.jpg -num=100-
person.jpg(入力)

-
output_image.jpg(出力)
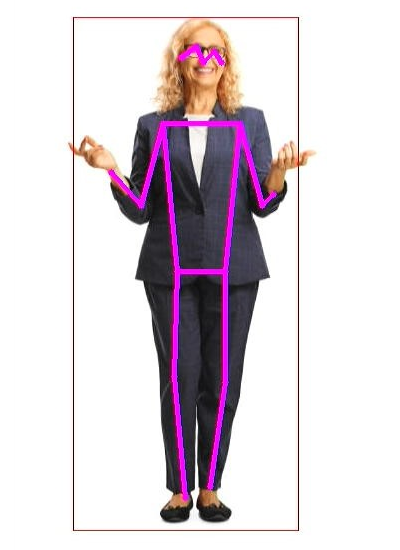
人物の目、耳、鼻、肩、肘、手、股関節、膝、足首の計17カ所を検出できています。
手元で計測したところ、100回実行時の平均 FPS は97.23でした。
まとめ
本コラムではHailo-8を利用して画像AIモデルを高速に実行する例を紹介しました。今回紹介したモデル以外にもHailo-8向けに最適化されたさまざまなモデルが提供されているため、高性能なAI処理を手軽に行うことができます。モデルは以下のHailo Model Explorer Visionからダウンロードすることができます。
また無償で提供されているHailo Dataflow Compilerを使えばカタログにない任意のモデルを変換することも可能です。Dataflow CompilerはONNXフォーマット、TensorFlow Lite (TFLite) フォーマットに対応しています。
Hailo-Application-Code-Examplesをはじめ、豊富なサンプルが提供されているためお客様の独自アプリケーションを短期間で作成することができると思います。ぜひ、Hailo-8を利用してエッジAIの世界に踏み出してみてください!
また、ネクスティ エレクトロニクス開発部では NXP社の i.MX シリーズを使用した製品開発や技術サポートを行っています。
i.MX 8やi.MX 95とHailo-8、Hailo-10Hを組み合わせた動作事例などお客様の要望に合わせた様々な製品のご紹介ができますので、お気軽にお問い合わせください。
参考リンク
お問い合わせ
関連技術コラム
関連製品情報

PSOC™ センシング・制御・HMIを1チップに。スマート機器をもっと自由に
PSOC™は高集積・高柔軟性のマイコンで、多様なセンシング技術と再構成可能なアナログ・デジタル機能を1チップで提供します。
- Infineon Technologies AG
- ICT・インダストリアル
- スマートファクトリー・ロボティクス

XMC™ 産業機器と民生機器の制御をスマートに。XMCで高性能・高信頼な組込み開発を実現
XMC™は高性能Cortex-Mマイコンで産業機器向けに高精度PWM・ADCと豊富な通信I/Fを備え制御開発を支援します。
- Infineon Technologies AG
- ICT・インダストリアル
- スマートファクトリー・ロボティクス
CodeMeter テキスト・データファイル暗号化
CodeMeterで、.dllや.exeなどの実行ファイルに加え、テキスト.txtや.dat のデータファイルも暗号化可能です。その流れを紹介します。
- WIBU-SYSTEMS AG
- ICT・インダストリアル
- スマートファクトリー・ロボティクス
- ソフトウェア
NXPのNPUを搭載したi.MX/MCXによるエッジAIソリューションをご紹介
利用が急増しているエッジAIについて、実際の機器を踏まえて解説します。NXPがリリースしている、NPUを搭載したプロセッサー、マイコンをご紹介します。
- NXP Semiconductors N.V.
- NEXT Mobility
- ICT・インダストリアル
- スマートファクトリー・ロボティクス

ミリ波レーダーを活用した在室検知 簡易デモシステム
高精度・低消費電力の在室検知デモシステムです。プライバシーに配慮した人物検知で、会議室の利用状況把握やバス置き去り防止に貢献します。
- Acconeer AB
- NEXT Mobility
- ICT・インダストリアル
TMC2241:65V 2ARMSのスマート内蔵型ステッピング・モーター・ドライバー(S/DおよびSPI搭載)
TMC2241は、65V対応の高性能ステッピングモーター・ドライバICです。静音動作や電流検出機能を備えています。
- Analog Devices, Inc.
- ICT・インダストリアル