Zephyr RTOSは、Linux Foundationが主導するオープンソースのリアルタイムOS
(RTOS)で、IoTや組込み機器向けに設計された軽量・高移植性のOSです。小規模デバイスから産業機器まで幅広く利用されており、セキュリティや長期運用にも対応しています。
NXPセミコンダクターズ社やSTマイクロエレクトロニクス社、インフィニオンテクノロジーズ社などの各ベンダーがIoTセンサー機器やウェアラブル機器、産業機器など、従来の「Linuxが重すぎる領域」を埋め、活用する選択肢として期待をしています。
そこで、本記事ではZephyr
SDKを使用したZephyr RTOS開発環境の構築方法をご紹介します。
Zephyr SDKとは、ARM Cortex-M、Intel
x86、RISC-Vなど複数アーキテクチャをサポートし、モジュール構造で必要な機能だけを選択し作成するためのフレームワークです。このフレームワークをカスタマイズや追加することで、独自の機能や開発をスムーズに立ち上げることが可能になります。
1.Zephyr RTOSについて
RTOSはFree RTOSなどMCU向けに幾つかあります。近年ではMCUも高性能化してきており、多様なアーキテクチャや用途で使うために柔軟性が求められていました。Zephyr RTOSはその柔軟性に対応し、他のRTOSやLinuxとは違う領域を埋める存在として注目されています。以下に比較をまとめてみます。
RTOSとLinuxとの比較
| 項目 | Zephyr RTOS | Free RTOS | Linux |
|---|---|---|---|
| 軽量性 | 非常に軽量 IoT向けに最適 | 非常に軽量 機能は限定的 | 重い リソースは豊富 |
| リアルタイム性 | 高い | 高い | 標準Linuxは弱い RTパッチが必要 |
| 拡張性 | モジュール構造で豊富 | 機能は比較的少ない | 非常に高い |
| サポート範囲 | IoT、産業機器、 ウェアラブル | 小規模IoT | サーバー、PC 組み込み高性能機器 |
| 商用サポート | Linux Foundation + 企業支援 | OSSコミュニティ | 豊富な商用サポート |
| ライセンス | Apache License 2.0 商用利用可能 | MIT License 商用利用可能 | GPLv2 商用利用可能(遵守必須) |
Zephyr RTOSのライセンスは、Apache License 2.0を採用し特許権の付与が明示されているため企業利用に安心感があります。コードの改変や再配布は自由ですが、著作権表示とライセンス文言を保持する必要がある点に注意が必要です。商用製品に組み込みやすいのはZephyr RTOS (Apache 2.0) とFree RTOS (MIT) です。Linux Kernel (GPLv2) は強いコピーレフト性があるため、ソース公開義務を受け入れられるかが採用判断の分岐点となります。
2.全体の流れ
Zephyr SDKを使用したZephyr RTOSの開発環境を構築する全体の流れです:
手順① 事前準備をする: ホストマシンのセットアップ
手順② 開発環境を構築してみよう: Zephyr SDKで開発環境を構築
手順③ ビルドしてみよう: とりあえず「Hello world」をビルド
手順④ 書き込みをしてみよう:生成されたイメージをボードに書き込む
手順⑤ 開発環境を構築してみよう:Visual Studio Codeでビルド
本記事では手順①~④(「手順①:事前準備をする」、「手順②:開発環境を構築してみよう」、「手順③:ビルドしてみよう」、「手順④:書き込みをしてみよう」)までを紹介し、手順⑤は次回の記事で紹介します。また、イメージとはビルドで生成したZephyr RTOSのブート用のイメージを指します。
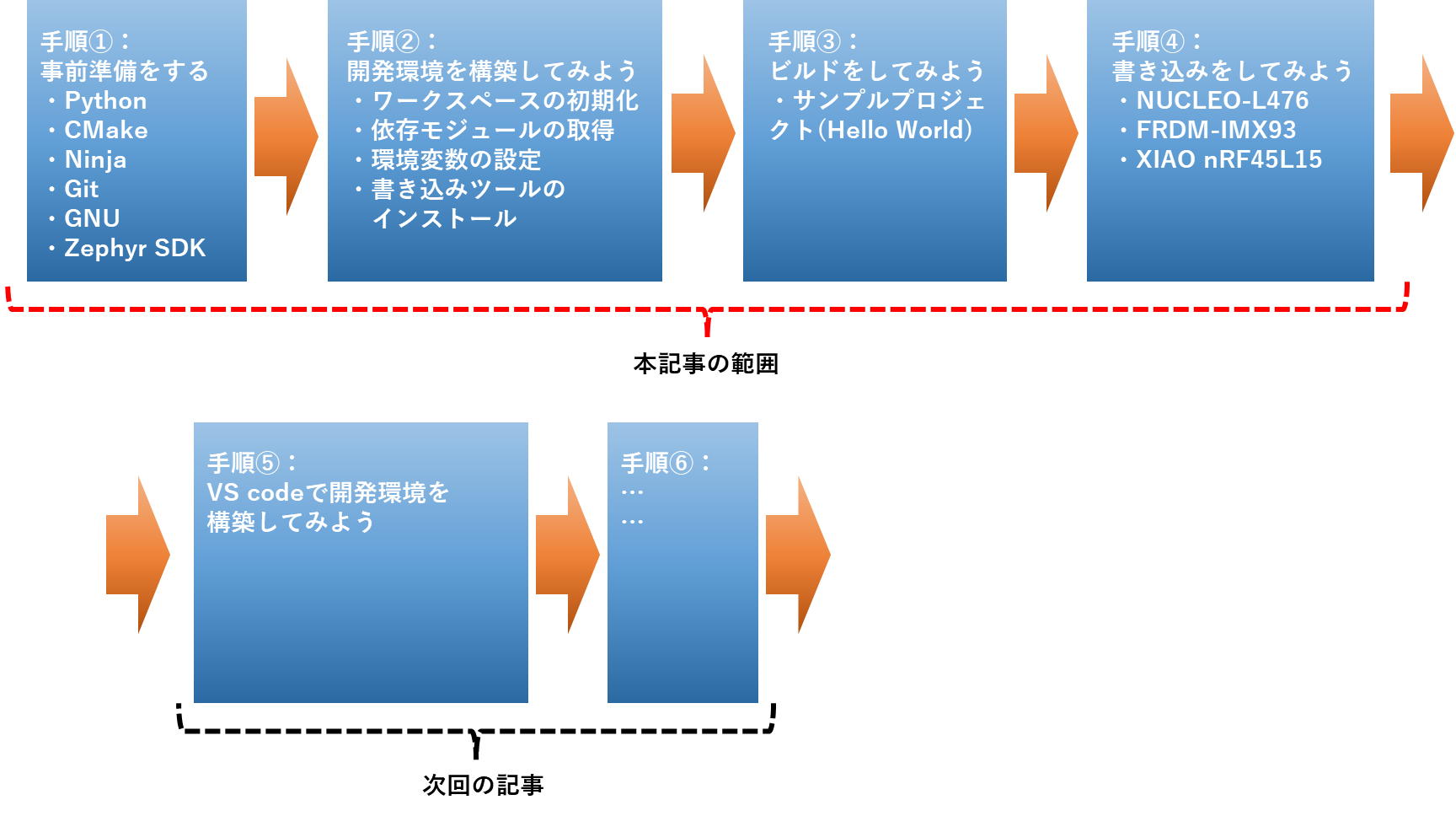
Zephyr RTOS開発環境を構築する全体の流れ
3.対応するハードウェアを知る
Zephyr SDKを使用してZephyr RTOSのビルドファイルを出力する方法は、Zephyr公式サイト「Getting Started Guide」で紹介されています。Zephyrをサポートしている対応アーキテクチャは以下の通りです。
Zephyrをサポートしている対応アーキテクチャ
| アーキテクチャ | 代表的なMCU | 主なメーカー | 主な用途・特徴 |
|---|---|---|---|
| ARM Cortex-M | STM32、Kinetis/MCX、 nRF52/nRF53、RA/RX | ST、NXP、Nordic、Renesas | IoT、組込み、低消費電力 |
| ARM Cortex-A | i.MX、RZ | NXP、Renesas | 高性能MPU、産業機器 |
| ARM Cortex-R | R-Car | Renesas | リアルタイム、安全性重視 |
| RISC-V | HiFive、ESP32-C3、GD32V | SiFive、Espressif、GigaDevice | IoT、組込み |
| x86 / x86-64 | Quark SE C1000 | Intel | テスト、PCクラス開発環境 |
| ARC (Synopsys) | EM/HS | Synopsys | IoT、DSP用途 |
| Xtensa | ESP32 | Espressif | IoT、無線通信 |
| MIPS | - | - | 組込み用途 |
| その他 | RP2040 | Raspberry Pi | IoT、教育用途 |
この記事では、STM32L476、i.MX93、nRF54L15を搭載した評価ボードでの環境構築方法を紹介します。
本記事で使用する評価ボード
| メーカー | MCU | 評価ボード名 |
|---|---|---|
| STマイクロエレクトロニクス | STM32L476 | NUCLEO-L476RG |
| NXPセミコンダクターズ | i.MX93 | FRDM-IMX93 |
| Nordic セミコンダクター | nRF54L15 | XIAO nRF54L15 |
4.手順①:事前準備をする
ホストマシンのセットアップを行います。ホストマシンの必要要件は下記になります。
ホストマシン必要要件
| 項目 | 必要要件 |
|---|---|
| OS | Windows、Linux、Mac OS |
| HDD | 推奨10GB以上 |
| メモリ | 推奨8GB以上 |
| USB | USB2.0 or 3.0 を1つ以上搭載 ※ホストマシンと評価ボードを接続し、書き込みを行う用途として想定しています |
上記の要件を満たせばホストマシンとして問題ありません。ただし、HDD容量はZephyr
SDKで数GBを必要としています。また、ビルドを行うと中間ファイルや生成ファイルを含めると、かなりのHDD容量を使用します。
また、開発環境を実行するには、インターネット接続が必要です。会社環境で使用する場合、Firewallの中からインターネット接続するためにProxy等の設定が必要になる場合があります。所属会社のIT部門へのご相談をお願いします。
今回の記事で使用したホストマシンは、筆者が開発業務で使用しているWindows
PCを使用しました。そのため、Zephyr開発環境の構築で使用する各種パッケージはWindows PCを前提として執筆しておりますが、お使いのホストマシンがLinuxやMac
OSで開発環境を構築する場合は、公式サイトに従って開発環境の構築をお願いします。
1.開発環境に必要なソフトウェア・ツールのインストール
Windows PCでZephyr開発環境を構築するには以下のソフトウェア、ツールが必要です。ソフトウェアとツールは最新版をインストールします。
必要なソフトウェア、ツール
| ソフトウェア、ツール | 説明 |
|---|---|
| Python 3.8以上 | WestコマンドなどZephyrツールが動くために必要 インストール時に「Add Python to PATH」にチェックを入れる |
| Git | Zephyrのソースを取得するために必要 |
| CMake | ビルド設定ツール インストール時に「Add CMake to system PATH」を有効にする |
| Ninja | 高速ビルドシステム ダウンロードしたZIPを解凍し、ninja.exeのパスを環境変数に追加 |
| GNU Arm Embedded Toolchain | ARM向けクロスコンパイラ |
| Zephyr SDK | Zephyr公式のビルド環境 |
本記事では、WindowsのCドライブにZephyrフォルダを作成し、その中にSDKやプロジェクトファイルを置いています。

2.Pythonのインストール
Pythonのインストールを行います。インストール時に「Add python.exe to PATH」にチェックを入れる。
「python
-–version」でバージョンが表示されることを確認します。下記は例となります。
python --version
python 3.14.1バージョンが表示されない場合はPathの設定がされていませんので、Pathの設定を行うか、再度インストールを行います。
3.CMakeのインストール
CMakeのインストールを行います。インストール時に「Add CMake to the PATH environment variable」にチェックを入れる。
「cmake
-–version」でバージョンが表示されることを確認します。下記は例となります。
cmake --version
cmake version 3.28.1バージョンが表示されない場合はPathの設定がされていませんので、Pathの設定を行うか、再度インストールを行います。
4.ninjaのインストール
ninjaのインストールを行います。公式サイトから「ninja.exe」をダウンロードして、システムの環境変数からPathを設定します。
「ninja
-–version」でバージョンが表示されることを確認します。下記は例となります。
ninja --version
1.13.2バージョンが表示されない場合はPathの設定がされていませんので、Pathの設定を行います。
5.Gitのインストール
Gitのインストールを行います。
「git -–version」でバージョンが表示されることを確認します。下記は例となります。
git --version
git version 25.0.windows.1バージョンが表示されない場合はPathの設定がされていませんので、Pathの設定を行うか、再度インストールを行います。
6.GNU Arm Embedded Toolchainのインストール
GNU Arm Embedded Toolchainのインストールを行います。
「arm-none-eabi-gcc -–version」でバージョンが表示されることを確認します。下記は例となります。
arm-none-eabi-gcc --version
arm-none-eabi-gcc.exe (GNU Tools for STM32 13.3.rel1.20240926-1715) 13.3.1 20240614
Copyright (C) 2023 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
Warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.バージョンが表示されない場合はPathの設定がされていませんので、Pathの設定を行います。
7.Zephyr SDKのインストール
Zephyr
SDKのインストールを行います。公式サイトから最新のzephyr-sdk-<version>-setup.exeをダウンロードして、C:¥Zephyr\zephyr-sdk-<version>にインストールを行います。インストール時に「Add
to PATH」を有効にします。
「west ––version」でバージョンが表示されることを確認します。下記は例となります。
west --version
west version v1.5.0バージョンが表示されない場合はPathの設定がされていませんので、Pathの設定を行います。
補足:
Pythonのバージョンにもよりますが、Zephyr
SDKとのバージョン組み合わせにより別途「pyelftools」「jsonschema」のインストールが必要な場合があります。
その場合を含め「pyelftools」「jsonschema」のインストールを行います。
pip install jsonschema
pip install pyelftools5.手順②:開発環境を構築してみよう
ホストマシンでZephyrプロジェクトのセットアップを行います。
以下のフォルダ構成にします。
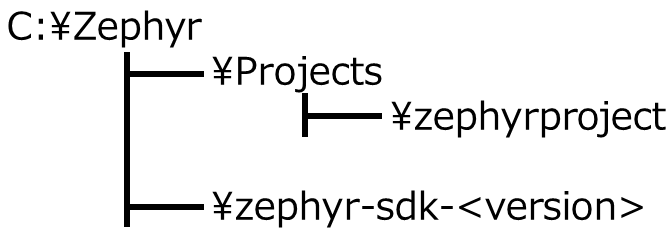
1.ワークスペースの初期化
指定した場所にワークスペースの初期化を行います。
west init C:\Zephyr\Projects\zephyrprojectコマンドの内容を下記に記載します。
| コマンド | 内容 |
|---|---|
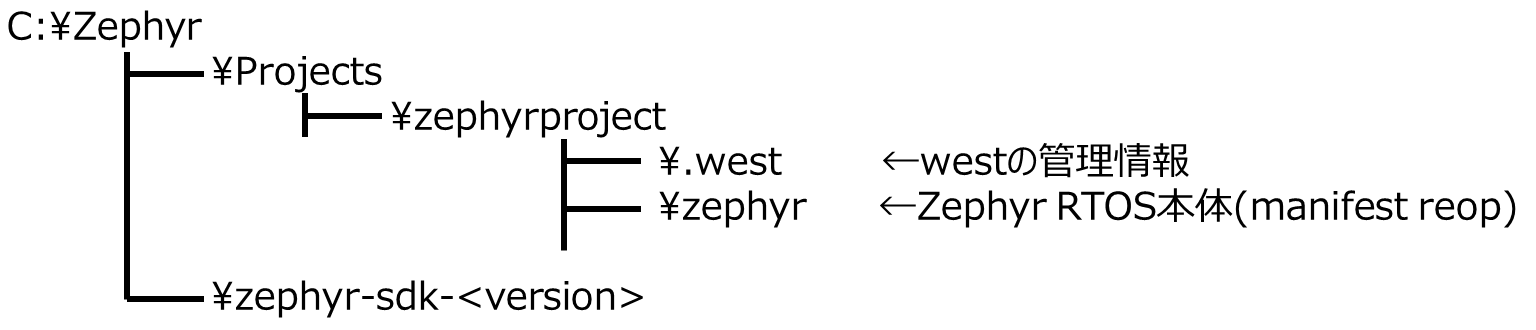
| west init <path> | 1.ワークスペースの作成 <path>に「.west」という管理用ディレクトリを作成します この中にmanifest(マニフェスト)リポジトリへの参照情報が保存されます 2.マニフェストリポジトリの取得 通常は「zephyrproject-rtos/zephyr」のGitリポジトリをクローンします このリポジトリは「west.yml」というマニフェストファイルがあります。Zephyr本体や依存する各種モジュール(HAL、ツール、サンプルコード)などの情報が含まれます 「west.yml」の詳細について、本記事では取り扱いません 3.ワークスペース構造の準備 「west init」の時点ではZephyr本体以外のモジュール取得はしません 依存モジュールは次の「west update」で行います |
west init実行後のディレクトリ構造は以下のようになります。
2.依存モジュールの取得
west initで準備したワークスペースに依存モジュールを取得・更新を行います。
cd C:\Zephyr\Projects\zephyrproject
west updateコマンドの内容を下記に記載します。
| コマンド | 内容 |
|---|---|
| west update | 1.マニフェストファイル (west.yml) の読み込み \zephyrリポジトリ内にある「west.yml」を参照します このファイルには Zephyr が依存する各モジュール(HAL、ドライバ、ツール、サンプルなど)のGitリポジトリ情報が記載されています 2.依存モジュールの取得・更新 「west.yml」に記載された各リポジトリをクローン又は更新をします 例:(modules/hal/nxp、modules/hal/stm32、modules/lib/cmsis)などを取得します 3.ワークスペースの同期 すでに取得済みのモジュールがあれば「git fetch」「git checkout」を行い、マニフェストで指定されたバージョン(SHAやタグ)に合わせます これにより、Zephyr本体と依存モジュールのバージョンが常に整合性を保ちます |
west update実行後のディレクトリ構造は以下のようになります。
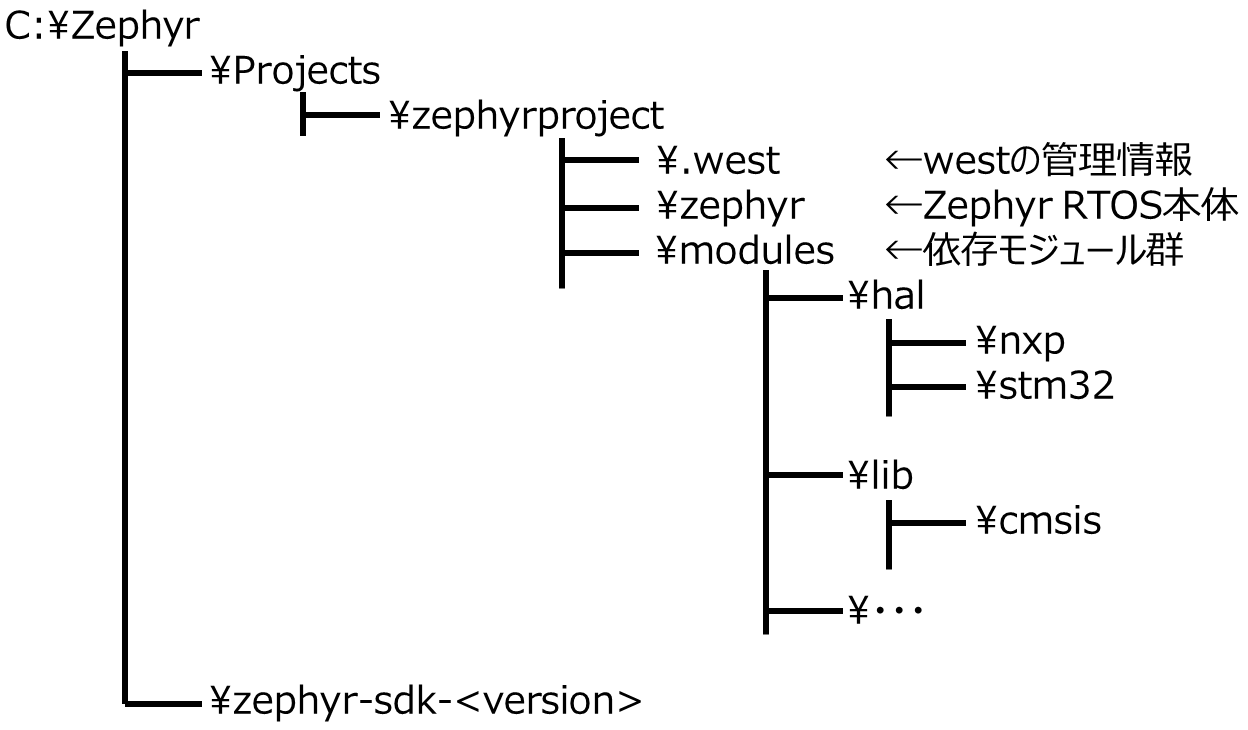
この時点でZephyrのビルド環境が完成しました。「west update」によって各ベンダーのHALやドライバが取得できるので、複数のベンダーやボードを扱う場合に、この仕組みが役立ちます。
3.環境変数を設定します
この項では必須ではありませんが、cmakeビルドシステムを外部ツールと連携する場合や、他のIDEから直接Zephyrプロジェクトを開く予定がある場合に備えて、環境変数を設定します。
west zephyr-exportコマンドの内容を下記に記載します。
| コマンド | 内容 |
|---|---|
| west zephyr-export | 1.環境変数の設定 「ZEPHYR_BASE」をZephyr本体のパスに設定します これにより、外部から「CMakeList.txt」を直接呼び出す際にZephyrのルートを認識できるようになります 2.外部ビルドツールとの連携 通常は「west build」を使えば自動的に環境が整いますが、 手動で「cmake」を呼びたい場合や他のIDE(例: EclipseやClion、VS CodeのCMake拡張)から直接Zephyrプロジェクトを開きたい場合に必要になります 3.一時的な環境設定 実行すると現在のシェルに環境変数がエクスポートされます そのため、別のターミナルを開いた場合は再度「west zephyr-export」を実行する必要があります |
4.書き込みツールをインストールします
ホストマシンとベンダーのボードをUSB接続する場合、ホストマシンに合わせて各ベンダーから提供されているUSBドライバや書き込みツールをインストールします。また、書き込みツールのPathの設定をしておきます。
本記事のホストマシンはJ-LinkとSTM32CubeProgrammerがインストール済みです。
主な書き込みツール
| ツール名 | 内容 |
|---|---|
| OpenOCD | 多くのARM系ボードで利用可能です ST-LINK, J-Link, CMSIS-DAPなど幅広いデバッグプローブに対応します |
| pyOCD | Arm社のCMSIS-DAP対応デバッガ用です 特にNXPやArm系MCU等で使われています |
| J-Link (SEGGER) | NordicやNXPなど、J-Linkを公式サポートするベンダーボードで利用します |
| STM32CubeProgrammer | STMicroelectronics製MCU用 ST-LINK経由での書き込みに利用される |
| その他ベンダー固有ツール | NXPのmcuboot系、Raspberry Pi Pico用のOpenOCD設定など |
6.手順③:ビルドしてみよう
前項で構築した開発環境でビルド(west build)してみます。
対象のボードはNUCLEO-L476RG、FRDM-IMX93、XIAO
nRF54L15ですが、最初にNUCLEO-L476RGをビルドしてみます。
1.サンプルプロジェクトへ移動
サンプルプロジェクトの「Hello World」をビルドしてみます。サンプルプロジェクトに移動します。
cd C:\Zephyr\Projects\zephyrproject\zephyr\samples\hello_world2.ビルドを実行します
west build -b nucleo_l476rgビルドが成功するとイメージファイル ¥build\zephyr\zephyr.elf を生成します。
コマンドの内容を下記に記載します。
| コマンド | 内容 |
|---|---|
| west build -b <board> | 1.CMakeのラッパー ZephyrはCMakeベースのビルドシステムを使っています 「west build」はCMake を直接叩く代わりに、Zephyr向けに最適化されたラッパーとして動作します 2.ビルドディレクトリの管理 「west build -b <board>」を実行すると、指定したボード用にビルドディレクトリを作成します デフォルトでは「\build」ディレクトリが生成され、そこにビルド成果物(ELF, HEX, BINなど)を出力します 3.ボードやアプリケーションの指定 「-b」オプションでターゲットボードを指定します ソースディレクトリを指定しない場合はカレントディレクトリをアプリケーションとして扱います 本記事ではソースディレクトリを指定していませんので、カレントディレクトリにビルドをしています 4.インクリメンタルビルド 既存のビルドディレクトリがある場合、差分のみ再ビルドします。そのため、ビルド時間は短くなります 「west build -p always」を使うとクリーンビルド(再生成)を強制できます |
ビルドが終わった状態で再度ビルドを行おうとすると下記のメッセージが表示される場合があります。
ninja: no work to do.これは既にビルドが終了しているというメッセージですが、何らかの理由で再ビルドを行いたい場合があると思います。その場合、強制ビルドを行います。
「-p always」をつけてビルドを行います。
west build -p always -b nucleo_l476rg7.手順④:書き込みをしてみよう
前項でビルドを行い、イメージファイルを作成しました。本項では実際にボードを使用して書き込みを行います。ホストマシンとボードを接続します。ここでは、USBで接続をしています。
1.書き込み(フラッシュ)を実行します
west flashコマンドの内容を下記に記載します。
| コマンド | 内容 |
|---|---|
| west flash | 1.成果物の転送 「west build」で生成された「zephyr.hex」や「zephyr.bin」をターゲットボードに書き込みます 書き込み方法はボード定義に依存し、「west.yml」やCMake設定に記載されています 2.フラッシュツールの呼び出し ボードごとに異なるツールが使われます。例: STM32系 → 「openocd」や「stm32cubeprogrammer」 Nordic nRF系 → 「nrfjprog」や「J-Link」 NXP系 → 「pyocd」 「west flash」はこれらを自動的に呼び出しますので、ユーザーは特に意識してツールを直接操作する必要はありません 3.オプション指定 「west flash -r <runner>」で使用するフラッシュツールを明示的に指定可能です 「west flash –hex-file <file>」で任意のファイルを指定して書き込み可能です |
2.シリアル出力を確認します
ST-Link経由で仮想COMポートが見えます。Tera TermやPuTTYで接続しボーレート115200bpsで開くと以下のような出力が見えます。
Hello World! nucleo_l476rg/stm32l476xx無事、Zephyrの起動が確認できました。
3.ボードを選んでビルド
ボードをNUCLEO-L476RGからFRDM-IMX93に変更して同じようにビルドを行い、書き込んでみます。
west build -b frdm_imx93ここで以下のエラーが出ることがあります。
west build -b frdm_imx93
ERROR: Build directory C:\Zephyr\Projects\zephyrproject\zephyr\samples\hello_world\build targets board nucleo_l476rg, but board frdm_imx93 was specified. (Clean the directory, use --pristine, or use --build-dir to specify a different one.)
FATAL ERROR: refusing to proceed without --force due to above errorこれは以前のビルドディレクトリにnucleo-l476rgの設定が残っているためです。そのため、通常ビルドディレクトリはボードごとに使い分ける必要があります。
対処方法①:「--pristine」オプションで既存のビルドをクリアして再ビルドを行う
west build -b frdm_imx93 --pristine「--pristine」はビルドディレクトリを完全に初期化して新しく設定したボードで再ビルドを行います。
元のnucleo_l476rgビルドは消えます。
対処方法②:「--build-dir」オプションでボードごとに別のビルドディレクトリを作る
west build -b frdm_imx93 –build-dir build_frdm_imx93既存の「build」ディレクトリはそのまま残せます。またボードごとにディレクトリも分けられます。
本記事では対処方法①で再ビルドを行います。
west build -b frdm_imx93 --pristineしかしここで、以下のエラーが出ると思います。
CMake Error at C:/Zephyr/Projects/zephyrproject/zephyr/cmake/modules/boards.cmake:285 (message):
Board qualifiers `/mimx9352` for board `frdm_imx93` not found. Please
specify a valid board target.
Valid board targets for frdm_imx93 are:
frdm_imx93/mimx9352/a55
frdm_imx93/mimx9352/m33
frdm_imx93/mimx9352/m33/ddrZephyr4.x以降ではサブターゲット(CPU/SoC)の指定が必要です。FRDM-IMX93はCortex-M33とCortex-A55があるので、「-b frdm_imx93」では不十分でCPUコアまで含めて指定します。
Cortex-A55を使用する場合
west build -b frdm_imx93/mimx9352/a55 --pristineCortex-M33を使用する場合
west build -b frdm_imx93/mimx9352/m33 --pristineビルド後のELFは同じ「build/zephyr/zephyr.elf」に生成されます。
今回は、Cortex-M33のビルドを行い、既にFRDM-IMX93のeMMCにインストールされているLinux
(U-Boot)からZephyrを起動します。U-BootはA55コアで動作しますので、A55コアからM33コアでZephyrを動作させることになります。SDカードにビルドをしたzephyr.binを入れ、ホストマシンとFRDM-IMX93を接続します。
FRDM-IMX93のeMMC内にLinuxが無い場合は、NXPの公式サイトからLinux
BSPをダウンロードしてSDカードに展開し、zephyr.binを同じフォルダに入れておきます。
Tera TermやPuTTYで接続する際にA55コア出力とM33コア出力の2つありますので、2つとも開いておきます。
A55コアのU-Boot起動時に以下のコマンドでZephyrを動作させる例です。
setenv loadaddr 0x80400000
load mmc 1:1 ${loadaddr} zephyr.bin
cp.b ${loadaddr} 0x201e0000 ${filesize}
bootaux 0x1ffe0000コマンドの内容を下記に記載します。
| コマンド | 内容 |
|---|---|
| setenv <variable> <address> | <variable>環境変数を設定します <address>0x80400000 はメモリ上のロード先アドレス 以降のコマンドで ${loadaddr} と書くと、このアドレスが参照されます |
| load <device> <address> <filename> | <device> MMC(SDカードやeMMC)からファイルをロードします mmc 1:1 → デバイス番号1のパーティション1を指定します <address>${loadaddr} → 読み込んだ内容をRAMのアドレス 0x80400000 に配置します <filename>zephyr.bin → 読み込むファイル名 |
| cp.b <address> <address> <filesize> | <cp.b>メモリコピーをバイト単位で行います <address>コピー元: ${loadaddr} (0x80400000) <address>コピー先: 0x201e0000 <filesize>サイズ: ${filesize}(直前のロードで自動的に設定されるファイルサイズ) → 読み込んだ zephyr.bin を別のメモリ領域に転送します |
| bootaux <address> | U-Bootの特殊コマンドで、セカンダリCPU (Auxiliary core) を起動します <address>引数 0x1ffe0000 は起動アドレス → メインCPU上のU-Bootから、別のコア(例えばCortex-Mコア)にファームウェアを渡して起動します。 |
M33コア側でTera TermやPuTTYで接続すると以下のような出力が見えます。
Hello World! frdm_imx93/mimx9352/m33無事、FRDM-IMX93でZephyrの起動が確認できました。
ボードをFRDM-IMX93からnRF54L15に変更して同じようにビルドを行い、書き込んでみます。ここでもCPUコアの指定が必要になります。
west build -b xiao_nrf54l15/nrf54l15/cpuapp --pristineビルドしたファイルを書き込むとTera TermやPuTTYから下記が出力されます。
Hello World! xiao_nrf54l15/nrf54l15/cpuapp無事、XIAO nRF54L15でZephyrの起動が確認できました。
8.次回について
次回は、本記事で作成した開発環境をVisual Studio Codeで構築して、GPIOなどを動かしてみます。
9.おわりに
今回はZephyrの開発環境を構築する方法について解説しました。今回の記事では開発環境を構築し、Hello Worldをビルドして複数のボードでZephyrが動作しているところを確認してみました。次回の記事では、開発環境をVisual Studio Codeに統合して、任意のコードを動かしてみます。また何かセンサー等を動作させ、実務に近づけた記事を作成予定です。
また、ネクスティエレクトロニクス開発部隊では、STマイクロエレクトロニクス社やNXPセミコンダクターズ社の製品開発や技術サポートを行っていますので、お気軽にお問い合わせください。
お問い合わせ
関連技術コラム
関連製品情報
AURIX™ 車載・産業用途に最適。高信頼・高性能を誇るマイコン~ASIL-D対応、安全・セキュアなシステム構築を支援~
AURIX™は高性能TriCore™マルチコアマイコンでASIL-D対応の安全機能と豊富な通信I/Fを備え車載・産業用途に最適です。
- Infineon Technologies AG
- NEXT Mobility

車載アプリケーション向け高速伝送技術GMSL
高速伝送技術GMSLについて解説しています。
- Analog Devices, Inc.
- NEXT Mobility
NXPの車載統合マイコンS12 MagniVの魅力を徹底解説
NXPの統合マイコンS12 MagniVは、ECUの小型化と短期開発を実現し、車載システムの電動化に貢献します。S12 MagniVの特長や利点を解説しています。
- NXP Semiconductors N.V.
- NEXT Mobility
- ICT・インダストリアル

XMC™ 産業機器と民生機器の制御をスマートに。XMCで高性能・高信頼な組込み開発を実現
XMC™は高性能Cortex-Mマイコンで産業機器向けに高精度PWM・ADCと豊富な通信I/Fを備え制御開発を支援します。
- Infineon Technologies AG
- ICT・インダストリアル
- スマートファクトリー・ロボティクス
CodeMeter クラウドによるユーザアカウントライセンス制御
クラウドベースのライセンス管理で、ソフトウェアの保護とライセンシングを効率化します。柔軟なライセンス運用と強固なセキュリティを実現します。
- WIBU-SYSTEMS AG
- ICT・インダストリアル
- スマートファクトリー・ロボティクス
- ソフトウェア

光学式ジェスチャーソリューション (アナログ・デバイセズ製品ユースケース)
赤外LEDを使用したジェスチャー判定を行うソフトウェアを簡単に生成できる、学習プラットフォームとハードウェアを用意しました。低コストで導入可能です。
- Analog Devices, Inc.
- NEXT Mobility
- ICT・インダストリアル
- スマートファクトリー・ロボティクス