半導体レーザーの主な用途
1. 代表的なアプリケーション
様々なアプリケーションで半導体レーザーが使用されていますが、ここでは代表的な採用例をいくつか紹介します。高い指向性や単色性、エネルギー密度等半導体レーザーの特徴を生かした用途となっています。
光通信
光を使った光通信技術はインターネットを始めとした情報通信インフラに広く活用されています。 高出力で高速変調が可能なレーザー光源と光ファイバー用いて長距離データ伝送を実現しています。

光ピックアップ
CD、DVD、BDといった光ディスク媒体の読み込み、書き込みを行うための光源として利用されています。 光の波長を短くするほど集光スポットサイズを小さくでき、記録情報の大容量化につながります。 CDでは780nm、DVDでは650nm、BDでは405nmの波長で発光する半導体レーザーが使用されます。

レーザーポインター、レーザー隅出し器
レーザーの高い集光性と直進性を生かし、レーザーポインタや建築現場等で位置合わせに使用される隅出し器の光源として利用されています。屋外でも視野性が高い緑色レーザーが使用される事が多いです。

3Dセンシング
赤外光レーザーを使用した3Dセンシング技術が注目を浴びており、顔認証や物体検知を行うための光源として利用が広がっています。具体例については後述します。

2. 半導体レーザーを使った3Dセンシング
3Dセンシングとは、2D画像だけでなく距離情報(奥行情報)をあわせて取得する技術です。
複数画像を用いて算出した視差情報や、光の反射時間など様々な情報を基に距離計算を行いますが、センシング光源としては半導体レーザーの採用が進んでいます。ここでは代表的な3つの方式について説明します。
ステレオカメラ方式
3Dセンシングの技術としてはステレオカメラ方式が広く知られています。
これは2つのカメラで物体に対する画像をそれぞれ取得し、画像間のズレから人間の目と同じように視差情報を作り出し距離計測を行う方式です。夜間や暗所での使用が想定される場合は赤外照明で物体を照らしセンシングするケースもあります。専用のステレオカメラを準備する事で比較的容易に3Dセンシングを実現する事ができますが、コストが高くなる事があります。また画像から視差情報を取得しにくい環境(霧や雨天時等)では精度が落ちる事もあります。照明光源としてはLEDが主流ですが、一部では半導体レーザーを補助的に利用し検知精度を向上させる構成もあります。

ToF(Time of Flight)方式
赤外光のレーザーを使い、光の速さを基に距離を算出します。自身が発した赤外光が対象物に反射し自身に帰ってくるまでの時間を計測します。光の速さを距離に換算するため、専用の高速な計測回路が必要になります。
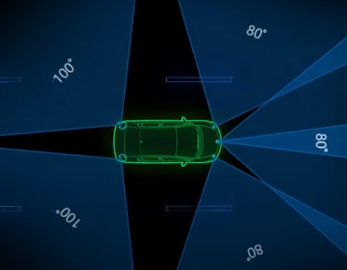
任意の1点との距離を測る1D-ToFと、照射領域を拡散させ広い範囲の距離情報を取得する3D-ToFがあります。特に後者の3D-ToFは光源となる赤外光レーザーの高出力化に伴い、数百メートル先の物体検知も可能となり主に車の自動運転に使用されるLiDARに使用されています。

Structured Light方式
特殊なパターンを投影する光源を用いて視差情報を取得し対象物との距離を算出する方式です。
カメラ1つと特殊パターンを投影させるプロジェクタ光源で構成され、視差情報を生み出すために特殊なパターンを対象物に投影し距離情報へ換算します。最近はVCSELの特徴である発光部の高密度化を生かし、Structured Light方式用の特殊なドットパターンを照射するドットプロジェクタ製品もリリースされています。
この場合、基準となるキャリブレーション画像をあらかじめ準備しておき、キャリブレーション画像と対象物へ特殊パターン投影時の画像を都度比較します。これによりパターンのズレから視差情報を算出し距離に換算します。数千~数万個のドットパターンを基に距離計算を行うため、分解能の高い3Dセンシングが可能です。

3. 3Dセンシング各方式の主な仕様比較
上記でご紹介した3Dセンシング方式について主な仕様比較表となります。
レーザーを光源としたToF方式やStrucured Light方式を使った3Dセンシングは、光源となるVCSELレーザーや受光側のカメラの性能進化によって車の自動運転、スマートホンの個人認証など様々な場面で応用が広がっています。但し、それぞれの方式で長所短所がありますので、採用されるアプリケーションにあわせて選択していく必要があります。
| - | ステレオカメラ | Time of Flight | Structured Light |
|---|---|---|---|
| 検出方法 | 視差情報(ステレオカメラ) | 照射光の往復時間 | 視差情報(特殊パターン) |
| 必要カメラ数 | 2 | 1 | 1 |
| 光源 | LED (使用環境による) | 赤外光レーザー | レーザー (特殊パターンプロジェクタ) |
| 暗所での使用 | △ | ◯ | ◯ |
| 消費電力 | 低 | 中/高 (測定距離による) | 中 |
| 測定距離 | 中距離 | 短~長距離 | 短~中距離 |
| 処理速度 | 中 | 高 | 中~高 |
| キャリブレーション | 必要 | 不要 | 必要 |
お問い合わせ
関連技術コラム
関連製品情報

GMSL2 設計の勘所
アナログ・デバイセズの次世代GMSL、GMSL2について特徴と、 設計の勘所を説明します。
- Analog Devices, Inc.
- NEXT Mobility
Livox 3D-LiDARを本格的な産業用途へ利用可能に | Livox Technology Company
Livox Technologyは、手頃な価格で高性能なLiDARセンサーを提供し、自律技術の普及を支援しています。
- Livox Technology Company Limited
- NEXT Mobility
- スマートファクトリー・ロボティクス
車載向け光センサーで明るさを検出 VEML6031
車載向け光センサーVEML6031は、スポーツカーの車速にも正確に応答し、太陽光から低透過率ガラスを介した光まで、広範囲の明るさを測定することができます。
- Vishay Intertechnology, Inc.
- NEXT Mobility
OSP (Open System Protocol) 概要
ams OSRAMのOSPは、車載LEDやセンサーを接続するための無料のオープンネットワーク技術です。車載のほかにもさまざまな用途で最適なシステムを実現します。
- ams-OSRAM AG
- NEXT Mobility
- ICT・インダストリアル

Neonodeの非接触センサー
Neonode非接触センサーモジュールは、TOF方式・1軸検知で手袋でも操作可能です。衛生対策、コロナ予防、開発期間短縮に貢献します。
- Neonode
- ICT・インダストリアル
- スマートファクトリー・ロボティクス
車載FETご紹介
Vishayは、電気自動車の大電力化に対応するため、ハーフブリッジ内蔵や上面放熱などさまざまなパッケージのFETを高耐圧でラインナップを拡充中です。
- Vishay Intertechnology, Inc.
- NEXT Mobility
- ICT・インダストリアル
- スマートファクトリー・ロボティクス